Главная задача регулятора задать такое положение, , чтобы из крана смесителя в ванной пошла вода нужной температуры. Не кипяток и не холод. Пользователь открывает кран в среднее положение, проверяет, если слишком холодно, открывает еще, горячее – закрывает. Сравнивая текущую температуру и желаемую, человек определяет разницу и в случае слишком большой разницы, крутит ручку сильнее и наоборот, если разница мала, крутит ручку медленно. ПИД-регулятор фактически делает примерно то же самое. Ему не важны конкретные значения температур, используется только разница между желаемой температурой и текущей. Т.е. сделать погорячее или похолоднее от того, что есть.
ПИД – сокращение от первых букв трех его составляющих П -пропорциональная, И –интегральная, Д –дифференциальная.
Пропорциональная – разницу температур между текущей и желаемой умножаем на пропорциональный коэффициент, получаем, на сколько надо повернуть ручку.
Интегральная – полученную ранее пропорциональную составляющую делим на время интегрирования, т.е. время, за которое, если бы начальные условия не изменялись, интегральная составляющая «доползет» до значения пропорциональной.
Дифференциальную составляющую рассматривать не будем, ибо она редко применяется. Фактически, в большинстве случаев используется ПИ-регулятор.

Вот и все. Для большего понимания рассмотрим на примере:
Начальное положение клапана Vo = 50,0%
Уставка SP = 20.0°С
Темп.воды Te = 19.0°С
Kprop = 10
Tint = 100 сек
Пропорциональная составляющая: Vprop = ((20.0 — 19.0) / 10) * 100 = 10.0%
Интегральная составляющая: Vint = 10.0 / 100 = 0.1%
Новое положение клапана: V = 50.0 + 10.0 + 0.1 = 60.1%
Через 1сек разница температур SP — Te не измениться, но за счет прибавки интегральной составляющей значение станет: V = 50.0 + 10.0 + (0.1 + 0.1) = 60.2% и т.д.
Для чего нужна интегральная составляющая?
С первого взгляда может показаться, что хватило бы и П-регулятора, зачем нужна интегральная составляющая. На самом деле, в случае П-регулятора температура на выходе никогда не достигнет уставки. Предположим мы угадали с первого раза и для того чтобы из крана бежала вода 20.0°С ручка должна иметь положение 60.0%. Снова проведем описанные выше вычисления без учета интегральной составляющей:
Начальное среднее положение клапана Vo = 50,0%
Уставка SP = 20.0°С
Температура воды Te = 20.0°С
Kprop = 10
Пропорциональная составляющая: Vprop = ((20.0 — 20.0) / 10) * 100 = 0.0%
Новое положение клапана: V = 50.0 + 0.0 = 50.0%
Т.е. как только температура совпадает с уставкой, пропорциональная составляющая равна нулю и мы возвращаемся к начальному положению клапана. Т.о. температура «зависнет» на полпути к уставке. Вот тут в работу вступает интегральная составляющая. Медленно, но уверенно с каждой секундой она будет увеличивать свое значение, чем ближе к уставке, тем меньше будет прибавляемый кусочек. Самое главное в этом процессе, то что интегральная составляющая не сбросится, как это происходит с пропорциональной, когда температура сравняется с уставкой.
Как влияют параметры ПИД-регулятора на процесс? Ответ на вопрос 4
Для чего же тогда нужна пропорциональная составляющая?
Возникает вопрос, а может можно обойтись только интегральной составляющей. В некоторых случаях, для очень медленно меняющихся процессов, наверно да. Очевидно, что процесс будет очень долгим. Пропорциональная составляющая отрабатывает очень быстро. Вместе они дополняют друг друга.
Несколько советов по подбору параметров работы ПИ-регулятора:
— Если система входит в бесконечный колебательный процесс, необходимо увеличить пропорциональный коэффициент в 1.5 раза. Регулятор станет работать более вяло, зато и колебания пропадут. Можно поэкспериментировать, уменьшая пропорциональный коэффициент. Время интегрирования мало влияет на процесс раскачивания, разве что если его установить совсем маленьким.
— После того как параметры подобраны, необходимо «качнуть» систему, чтобы проверить, не входит ли регулятор в вечный колебательный процесс или может работает слишком заторможено. Для этого достаточно изменить уставку на несколько градусов.
— Если температура плавно ползет к уставке, а потом вдруг замирает не дойдя, например, 1.0°С, скорее всего в регуляторе используется «мертвая зона». Она нужна для того, чтобы постоянно не дергать клапан, отслеживая незначительные колебания температуры. Если регулятором управляется, например, частотный регулятор вентилятора, «мертвую зону» можно и нужно выставить в 0.
- Главная
- Готовые решения
- VNT-230 Графическая панель управления CNS-300
Управление через Интернет - SCADA система
- SUP Приточно-вытяжная установка
- EXH Вытяжная установка
- ITP Тепловой пункт
- PUMP Насосы
- HEAT Котельная
- XC Холодильная станция
- Документация
- VNT-230 Графическая панель управления CNS-300
- Подключение компонентов автоматики
- Конфигурирование и пусконаладка
- Пуск системы
- Эксплуатация
- Настройка ПИД-регуляторов
- Контроллер EskoRT
- Каталог
- Цены
- Контакты
Система управления
Прежде чем переходить непосредственно к пиду, очень важно понять и запомнить несколько базовых понятий, из которых состоит автоматическая система. В первую очередь это регулятор, который всем заправляет и находится в центре системы. Регулятор в данном понимании – математический алгоритм или часть программы, которая крутится на микроконтроллере. Регулятор, как алгоритм, работает с обычными числами. Объект управления – это девайс, которым мы управляем, например печка или мотор. Для этого у нас есть управляющее устройство, например диммируемый тен или драйвер мотора. Управляющее устройство получает от регулятора управляющий сигнал, то есть конкретное число. Это может быть заполнение шим сигнала, от 0 до 255, а может быть угол поворота сервомашинки от 0 до 180, потому что регулятору без разницы чем управлять. В объекте управления у нас стоит датчик, с которого регулятор получает управляемую величину, то есть текущий сигнал с датчика. Это – обратная связь, которая и даёт возможность системе точно поддержать заданное значение. В случае с печкой это температура, а с мотором – частота оборотов. Ну и наконец регулятор получает установку (уставку), то есть число, к которому он должен привести текущее значение с датчика. Установка может задаваться каким угодно образом: крутилкой, ползунком, энкодером, кнопками, да хоть смской или голосовым вводом. Регулятору это неважно, для него это просто цифра. Задача регулятора состоит в том, чтобы сравнивать текущее значение с установкой и выдавать управляющий сигнал на управляющее устройство. То есть в программе это будет выглядеть условно так: регулятор получил установку, регулятор получил значение с датчика, регулятор выполнил вычисления и выдал нам управляющий сигнал, опять же число. Если это шим – мы его подаём через функцию генерации шим. Есть ещё один момент – регулятор должен делать расчёты и применять управляющий сигнал через равные промежутки времени, то есть с равным периодом или частотой. Эта частота называется частотой дискретизации системы, а период обозначается как dt, прямо как период интегрирования.
ПИД регулятор состоит из трёх составляющих: пропорциональной P, интегрирующей I и дифференциирующей D, формируется просто как сумма трёх значений, умноженных каждая на свой коэффициент. Эта сумма после вычислений становится управляющим сигналом, который подаётся на управляющее устройство, обозначим его как out.
out = P*kP + I*kI + D*kD
kP, kI и kD это и есть те самые коэффициенты, которые нужно настроить для работы ПИДа. Значения тут могут быть самые разные, от 0.001 то десятков и тысяч, это зависит от конкретной системы. Тут есть ещё один момент: любой коэффициент может быть равен нулю, и в таком случае обнуляется вся его компонента. То есть регулятор можно превратить в П, ПИ, ПД, и прочие сочетания. Разные системы требуют разного подхода, именно поэтому ПИД регулятор такой универсальный. В дальнейшем будем пользоваться следующими названиями переменных:
- out – выход с регулятора (управляющий сигнал)
- setpoint – установка (заданное значение)
- input – вход (значение с датчика)
- err – ошибка регулирования
- dt – период вычисления и регулирования
P составляющая
Пропорциональная составляющая предоставляет собой разность текущего значения с датчика и установки.
P = setpoint — input
Данная разность называется ошибкой регулирования, то есть насколько далеко находится система от заданного значения. Получается чем больше ошибка, тем больше будет управляющий сигнал и тем быстрее система будет приводить управляемую величину к заданному значению. Коэффициент kP тут влияет роль усиления ошибки и настраивается вручную. Но в то же время, если система пришла к заданной величине, ошибка станет равной нулю, и управляющий сигнал тоже! Другими словами, п регулятор никогда не сможет привести к заданному значению, всегда будет некая ошибка. П составляющая является основной в ПИД регуляторе и так сказать тянет самую большую лямку, регулятор может неплохо работать только лишь на ней одной. P составляющая исправляет ошибку в текущий момент времени.
I составляющая
Интегральная составляющая просто суммирует в саму себя ту же самую ошибку, разность текущего и заданного значения, умноженную на период дискретизации системы, то есть на время, прошедшее с предыдущего расчёта dt – фактически берёт интеграл от ошибки по времени.
I = I + (setpoint — input) * dt
В самом регуляторе это ещё умножается на коэффициент kI, которым настраивается резкость данной составляющей. В интегральной составляющей буквально копится ошибка, что позволяет регулятору с течением времени полностью её устранить, то есть привести систему ровно к заданному значению с максимальной точностью. I составляющая исправляет прошлые, накопившиеся ошибки.
D составляющая
Дифференциальная составляющая представляет собой разность текущей и предыдущей ошибки, поделенную на время между измерениями, то есть на ту же dt, которая общий период регулятора. Иными словами – это производная от ошибки по времени.
err = setpoint — input D = (err — prevErr) / dt prevErr = err
Фактически D составляющая реагирует на изменение сигнала с датчика, и чем сильнее происходит это изменение, тем большее значение прибавляется к общей сумме. Иными словами, D позволяет компенсировать резкие изменения в системе и при правильной настройке предотвратить сильное перерегулирование и уменьшить раскачку. Коэффициент д позволяет настроить вес, или резкость данной компенсации, как и остальные коэффициенты регулируют свои составляющие. D составляющая в первую очередь нужна для быстрых систем, то есть для систем с резкими изменениями, такие как квадрокоптер или шпиндель станка под переменной нагрузкой. D составляющая исправляет возможные будущие ошибки, анализируя скорость.
Настройка регулятора
Для настройки регулятора нужно варьировать коэффициенты:
- При увеличении kP увеличивается скорость выхода на установленное значение, увеличивается управляющий сигнал. Чисто математически система не может прийти ровно к заданному значению, так как при приближении к установке П составляющая пропорционально уменьшается. При дальнейшем увеличении kP реальная система теряет устойчивость и начинаются колебания.
- При увеличении kI растёт скорость компенсации накопившейся ошибки, что позволяет вывести систему точно к заданному значению с течением времени. Если система медленная, а kI слишком большой – интегральная сумма сильно вырастет и произойдёт перерегулирование, которое может иметь характер незатухающих колебаний с большим периодом. Поэтому интегральную сумму в алгоритме регулятора часто ограничивают, чтобы она не могла увеличиваться и уменьшаться до бесконечности.
- При увеличении kD растёт стабильность системы, она не даёт системе меняться слишком быстро. В то же время kD может стать причиной неадекватного поведения системы и постоянных скачков управляющего сигнала, если значение с датчика шумит. На каждое резкое изменение сигнала с датчика Д составляющая будет реагировать изменением управляющего сигнала, поэтому сигнал с датчика нужно фильтровать (читай урок по фильтрам).
Вот так выглядит процесс стабилизации при изменении коэффициентов: Настройка регулятора – дело не очень простое. Начальные коэффициенты для подбора можно получить по следующему алгоритму: сначала выставляем все коэффициенты в 0. Плавно увеличиваем kP до появления незатухающих колебаний. Значение kP, при котором они появились, запишем и обозначим как kP1. Далее замеряем период колебаний системы в секундах, обозначим как T. Итоговые коэффициенты получим так:
- kP = 0.6 * kP1
- kI = kP / T * 2 * dt
- kD = kP * T / 8 / dt
Например, незатухающие колебания появились при kP 20, период колебаний составил 3 секунды. Период dt в системе будет 50 мс (0.05 с). Считаем:
- kP: 0.6*20=12
- kI: 12/3*2*0.05=0.4
- kD: 12*2/8/0.05=60
На полученных коэффициентах должны более-менее работать большинство систем, но не все. Также можно воспользоваться автоматическим тюнером коэффициентов, например два разных алгоритма встроены в библиотеку GyverPID.
Общие принципы настройки ПИД-регулятора термоконтроллера
В теории существует множество математических методов настройки ПИД регулятора. На практике в большинстве случаев используют ручной способ, реже – автоматическую настройку. Особенность ручного подбора коэффициентов – наличие опыта и знаний у инженера, понимание процессов, протекающих в технологической системе. Для настройки коэффициентов PID регулятора температуры вручную требуется выполнить следующих алгоритм действий:
- Выставить на терморегуляторе требуемое значение уставки (SV).
- Настроить P-составляющую. Для этого выставить низкое значение коэффициента, затем постепенно повышать. Увеличивать необходимо до момента получения подходящей статической ошибки. Если в системе появляется перерегулирование, следует прекратить увеличение П-коэффициента.
- Настроить I-составляющую. Необходимо начать с малых значений и увеличивать их до появления постоянных небольших колебаний вокруг уставки.
- Настроить D-составляющую. Постепенно увеличивать составляющую до максимальной компенсации имеющихся колебаний.
Данный алгоритм итерационный, к любым его действиям можно возвращаться в процессе настройки. При отладке регулировочного контура удобно пользоваться графиком, отражающим значение технологического параметра.
У некоторых температурных регуляторов есть функция автоматической настройки коэффициентов регулирования. В этом случае значения составляющих вычисляются электроникой. При настройке PID-регулятора необязательно использовать все 3 составляющие. Для некоторых систем будет достаточно двух или одного коэффициента. Всего существует 4 режима, в которых может работать терморегулятор:
- П-регулирование;
- ПД-регулирование;
- ПИ-регулирование;
- ПИД-регулирование.
Также важно знать, какие механизмы или устройства управляют подачей охлаждения и нагревания системы. Это может быть клапан, который отвечает за подачу хладагента или теплоносителя, ТЭН, вентилятор и пр. Для одной системы может существовать несколько устройств для управления температурой. В таких случаях лучше использовать температурные регуляторы с двумя и более выходными каналами управления.
Пример настройки ПИД-регулятора на микроконтроллере STM32.
Итак, проект мы создали в первой части, сейчас же целенаправленно займемся настройкой значений:
float Kp = 0; float Ki = 0; float Kd = 0;
На данный момент все коэффициенты в нуле, то есть регулятор не функционирует. Начинаем последовательно производить настройку описанным экспериментально-аналитическим способом. Прикинем возможные диапазоны значений. Итак, пусть невязка (разница между текущим значением температуры и целевым) равна 1°C. Выходной сигнал может изменяться от 0 до 1000 (длительность импульсы ШИМ-сигнала для управления охлаждением). Если поставим K_p равным 100, то на это значение невязки получим длительность импульса выходного ШИМ-сигнала равной 100, вполне адекватное значение.
Для анализа поведения системы будем производить следующее:
- Задаем целевое значение 30°C, ждем пока система стабилизируется.
- Задаем целевое значение 40°C, аналогично ожидаем эффекта.
- Строим график зависимости температуры датчика от времени и анализируем полученное.
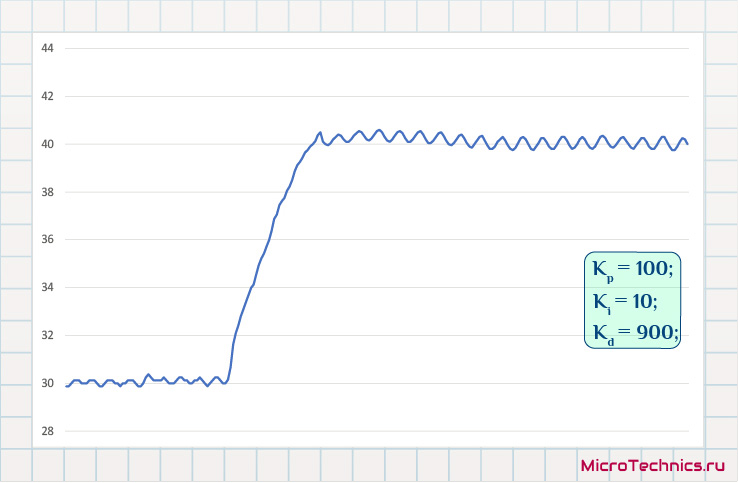
Приступаем, тест №1:
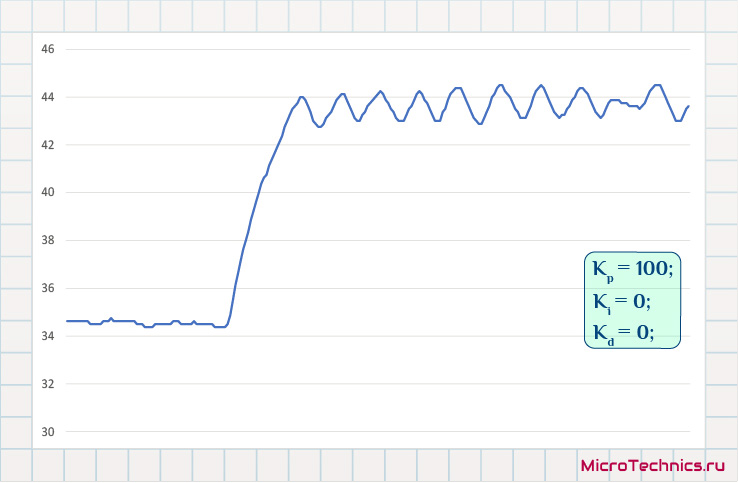
Видим, что все точно в соответствии с теорией – при использовании только пропорциональной составляющей система не может выйти на требуемые значения из-за статической ошибки. Отлично, добавим интегрирующую составляющую, задав некоторое значение K_i :
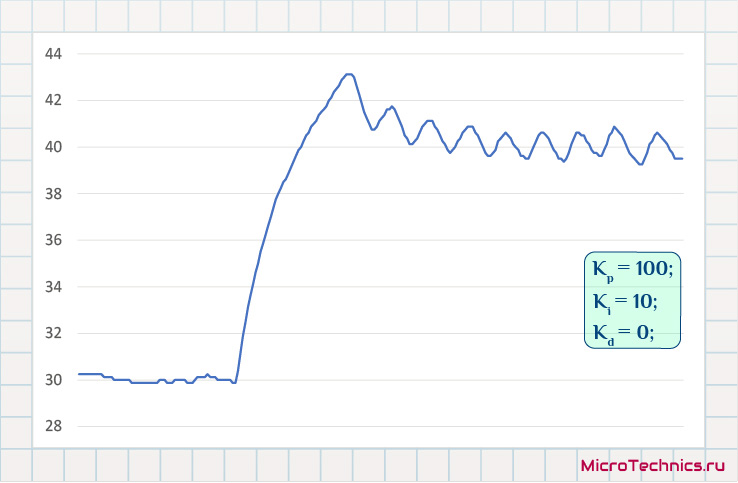
На этот раз уже все иначе – целевое значение более-менее установить удается, но имеем неслабый выброс при подходе к значению. Логичным шагом будет увеличение коэффициента усиления дифференцирующей составляющей:
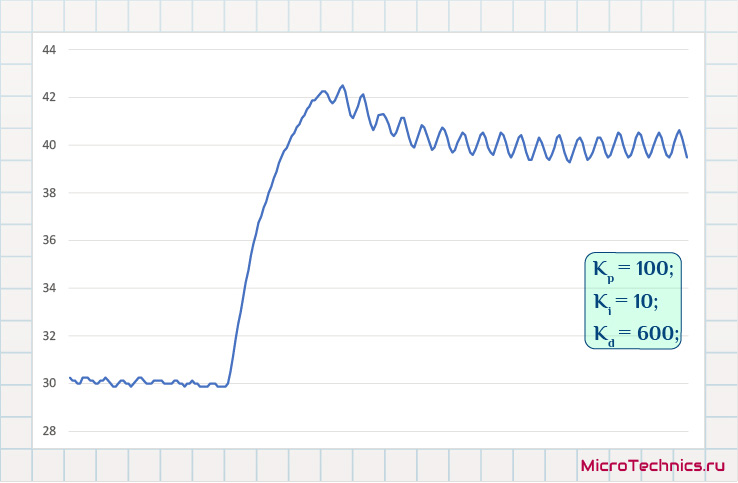
Так, стало получше (амплитуда выброса уменьшилась), увеличиваем K_d еще:
Отлично, выброс практически погасили, но выходить на нужное значение хотелось бы побыстрее. Вывод очевиден – увеличиваем коэффициент усиления пропорциональной составляющей ( K_p ):
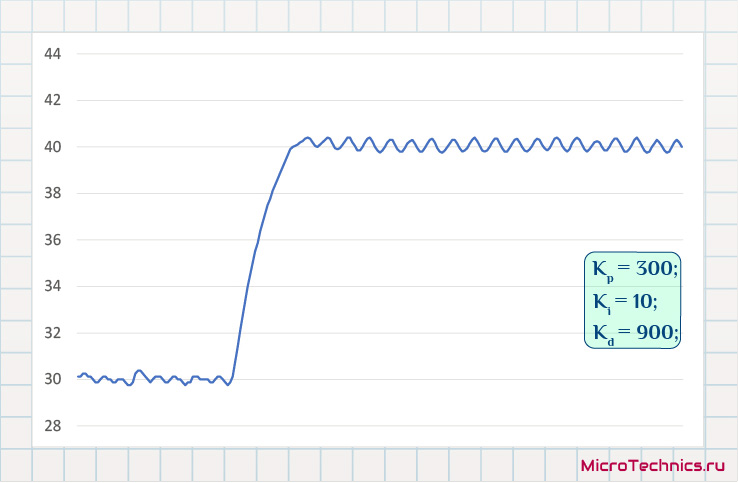
Вот, намного приятнее, посмотрим на последние два варианта друг относительно друга:
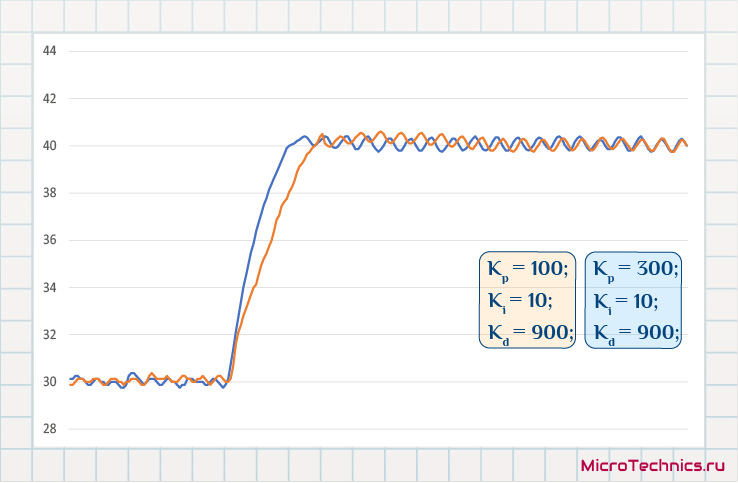
Вполне себе ничего результат в итоге. Опять же система очень инертная изначально, датчик производит измерения не слишком быстро, да и шаг дискретизации приличный — 0.125 °C. Так что результат вполне годный. Наблюдаемые промежуточные графики очень хорошо демонстрируют суть протекающих процессов, а это и было нашей целью – получение наглядного примера, дополняющего рассмотренные теоретические аспекты. Так что на этом заканчиваем на сегодня, следите за обновлениями и спасибо за внимание
Методика настройки цифрового ПИД-регулятора
Обычно, при использовании пропорционально- интегрально-дифференциального или ПИД- (PID- Proportional-Integral-Derivative) регулятора и грамотной его настройке, достигается лучшая точность управления по сравнению с двухпозиционным (релейным) регулятором. Но для оптимальной настройки регулятора и, как следствие, получение желаемого качества управления, необходимо понимание механизмов и принципов работы ПИД-регулятора.
При ПИД-регулировании сигнал управления зависит не только от разницы между текущим и заданным значением (величины ошибки или рассогласования), а также от накопленной ошибки (интеграла) и от скорости изменения ошибки во времени (дифференциала). В результате ПИД-регулятор обеспечивает такое значение сигнала управления, при котором ошибка в установившемся режиме стремится к нулю.Качество управления определяется многими факторами, ключевыми являются недетерминированность объекта управления, точность ввода-вывода регулятора и интенсивность внешних воздействий.
 |
| Математическое выражение ПИД-регулятора |

где:
Xp — полоса пропорциональности
Ei = (SP-PV) = (уставка-тек) = ошибка (рассогласование)
Тд — постоянная времени дифференцирования
∆Ei — разность ошибок соседних измерений (Ei — Ei-1)
∆tизм — время между соседними измерениями (ti — t i-1)
Ти — постоянная времени интегрирования
— Накопленная к i-ому шагу сумма рассогласований (интегральная сумма)
Легко заметить, что сигнал управления является суммой трех составляющих: пропорциональной (слагаемое 1), дифференциальной (слагаемое 2), и интегральной (слагаемое 3).
Пропорциональная составляющая зависит от текущей ошибки Ei и компенсирует текущую ошибку пропорционально ее величине.
Дифференциальная составляющая зависит от скорости изменения ошибки ∆Ei / ∆tизм и компенсирует резкие возмущения.
Интегральная составляющая накапливает ошибку регулирования, что позволяет ПИД-регулятору поддерживать нулевую ошибку в установившемся режиме (устраняет статическую ошибку управления).
Обычно ПИД-регулятор имеет дополнительные параметры помимо трех коэффициентов (Xp, Ти, Тд). Рассмотрим их более подробно на примере скриншота меню параметров ПИД-регулятора прибора “Параграф PL20”.
 |
| Рис. 1 |
Каналов (выходов) ПИД-регулирования в приборе может быть несколько и параметры для каждого из них свои собственные. Поэтому выберите желаемый канал в первой графе.
Источником обратной связи с объекта управления (текущая контролируемая величина) может быть любой измерительный канал прибора, поэтому необходимо выбрать желаемый измерительный канал в графе ВЛАДЕЛЕЦ.
ПИД-регулятор может управлять как по закону прямой логики (управление печью), так и по обратному закону (управление хладоустановкой). Выберите желаемую логику работы.
Уставка (SP) – это желаемая величина, на которую регулятор должен выйти в установившемся режиме.
Xp – зона пропорциональности. Задается в единицах контролируемой величины (для терморегулятора в градусах). Зона пропорциональности называется так, потому что только в ней ((SP — Xp)…(SP + Xp)) пропорциональная составляющая ПИД-регулятора может формировать мощность выходного сигнала управления пропорционально ошибке. А за ее пределами мощность будет равна либо 0%, либо 100%. Таким образом, чем уже эта зона, тем быстрее отклик регулятора, но слишком высокое быстродействие может ввести систему в автоколебательный режим.
Ти – постоянная времени интегрирования.
Тд – постоянная времени дифференцирования.
Текущая мощность – это информационный параметр.
Минимальная и максимальная мощность определяют границы мощности выхода ПИД-регулятора.
Аварийная мощность – это такая мощность, которая формируется регулятором при неисправности датчика или измерительного канала. Так можно обеспечить отрицательную температуру холодильной камеры или не дать остыть печи даже при аварийной ситуации.
Последним параметром идет период ШИМ. Этот параметр один для всех ПИД-регуляторов, т.к. каналы ШИМ синхронизированы между собой от одного таймера. ШИМ сигнал позволяет регулировать мощность посредством регулировки скважности сигнала (регулируется ширина импульса при постоянной частоте модуляции). Разрядность ШИМ (число позиций мощности) равна 8192 дискреты (13 бит). Период ШИМ (от 1 мс до 250 сек). Этот параметр зависит от типа и коммутационных способностей силовых исполнительных ключей (м.б. реле, пускатель, твердотельное реле, симистор). Чем выше частота коммутации (чем меньше период) тем больше тепловые потери в ключах (квадратичная зависимость потерь от частоты) и больше износ механических коммутаторов, но лучше качество регулирования. Важно найти золотую середину.
Настройка пропорциональной компоненты (Xp)
Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, постоянная интегрирования устанавливается максимально возможной (Ти = макс), а постоянная дифференцирования минимально возможной (Тд = 0). Устанавливается безопасная величина уставки, равная (0,7…0,9)×SP, где SP – это реальная уставка настраиваемой системы. Зона пропорциональности устанавливается минимально возможной (Xp = 0).
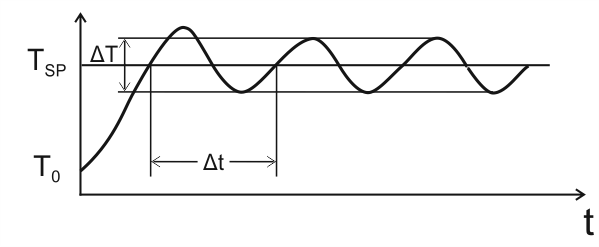
В этом случае регулятор выполняет функции двухпозиционного релейного регулятора с гистерезисом равным нулю. Регистрируется переходная характеристика.
 |
| Рис. 2 |
Т0 — начальная температура в системе;
ТSP — заданная температура (уставка);
∆T — размах колебаний температуры;
∆t — период колебаний температуры.
Установить зону пропорциональности равной размаху колебаний температуры: Xp = ∆T. Это значение служит
первым приближением для зоны пропорциональности.
Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис. 3.
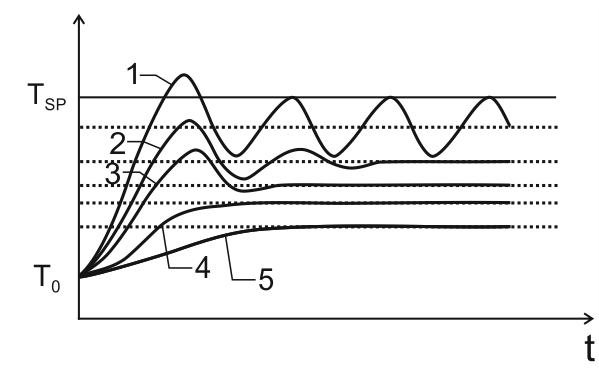 |
| Рис. 3 |
Переходная характеристика типа 1: Значение зоны пропорциональности очень мало, переходная характеристика далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2: В переходной характеристике наблюдаются затухающие колебания (5 — 6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД-регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3: В переходной характеристике наблюдаются небольшой выброс (перерегулирование) и быстро затухающие колебания (1 — 2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4: Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5: Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Настройка дифференциальной компоненты (Tд)
Этот этап присутствует только в том случае, если применяется полнофункциональный ПИД-регулятор. Если дифференциальная компонента применяться не будет (используется пропорционально-интегральный (ПИ) регулятор), то следует пропустить этот этап.
На предыдущем этапе была задана зона пропорциональности, соответствующая переходной характеристике типа 2, в которой присутствуют затухающие колебания (см. рис. 3, кривая 2, рис. 4, кривая 1.).
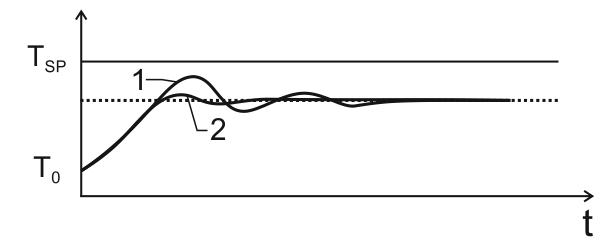 |
| Рис. 4 |
Следует установить постоянную времени дифференцирования Тд так, чтобы переходная характеристика имела вид кривой 2 на рис. 4. В качестве первого приближения постоянная времени дифференцирования делается равной Тд = 0,2×∆t.
Примечательно то, что дифференциальная компонента устраняет затухающие колебания и делает переходную характеристику, похожей на тип 3 (см. рис. 3). При этом зона пропорциональности меньше, чем для типа 3. Это значит, что динамическая и статическая точность регулирования при наличии дифференциальной компоненты (ПД-регулятор) может быть выше, чем для П-регулятора.
Настройка интегральной компоненты (Ти )
После настройки пропорциональной компоненты (а при необходимости и дифференциальной компоненты) получается переходная характеристика, показанная на следующем рисунке, кривая 1.
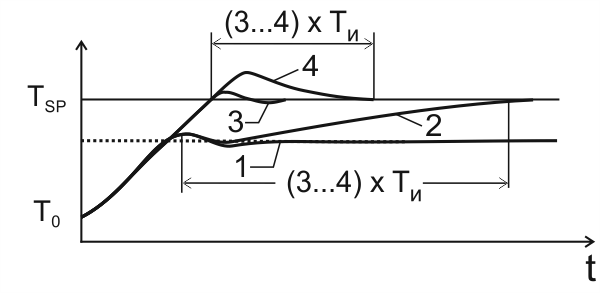 |
| Рис. 5 |
Интегральная компонента предназначена для того, чтобы убрать остаточное рассогласование между установившимся в системе значением температуры и уставкой. Начинать настраивать постоянную времени интегрирования следует с величины Ти = ∆t.
Переходная характеристика типа 2: Получается при чрезмерно большой величине постоянной времени интегрирования. Выход на уставку получается очень затянутым.
Переходная характеристика типа 4: Получается при слишком малой величине постоянной времени интегрирования. Если постоянную времени интегрирования уменьшить еще, то в системе могут возникнуть колебания.
Переходная характеристика типа 3: Оптимальная.

Использованные источники информации
- Сабинин Ю.А. Ковчин С.А. “Теория электропривода”
- Шрейнер Р. Т. “Системы подчиненного регулирования электроприводов”
- Олссон, Пиани “Цифровые системы автоматизации и управления”
- Материалы сайта www.asu-tp.org
Назначение ПИД-регулятора
Установка ПИД-регулятора является самым эффективным фактором, позволяющим регулировать параметры систем с частотными преобразователями в цепи управления. Регулировочный модуль воспринимает цепочку данных от задействованных элементов системы, обрабатывает их, и на основе полученной информации формирует собственный управляющий сигнал. На примере контроля значения температуры, в подверженных к нагреву установках, ПИД-регулятор в автоматическом режиме производит изменения мощностных параметров системы. Это позволяет понизить обороты электродвигателя, либо снизить мощность подконтрольной установки. Таким образом предотвращается перегрев технологического оборудования. Похожее взаимодействие различных узлов системы широко применяется во многих сферах производства и жизнедеятельности. Наибольшее распространение регулировочные блоки получили в управлении процессами поддержания расхода, давления, скорости и температуры.
- Выставление всех регулирующих параметров на значения равные «0».
- Установка максимальной рабочей мощности регулируемой установки. Осуществление ступенчатого увеличения значения пропорционального регулятора. Непрерывное наблюдение за реакцией системы на изменение параметров. Увеличение производить до момента появления отчётливых колебаний, вызванных процессом перерегулирования.
- Произвести уменьшение значения пропорционального регулятора. Достигнуть стабильности системы, зафиксировав момент положения регулятора, при котором достигнуто полное затухание колебаний.
- Уменьшить значение регулятора ниже стабилизационного предела системы на 15%. После этого понизить рабочую мощность подконтрольной установки.
- Поэтапно увеличивать рабочую мощность системы. Повышать положение интегрального регулятора до тех пор, пока не станет очевидным процесс затухания колебаний. Показатель интегрального регулятора понизить до уровня, при котором установка снова станет стабильной.
- В случае необходимости установки значения дифференциального регулятора, надлежит постепенно повышать скорость вращения привода. Следует добиться положения дифференциального регулятора, при котором система останется стабильной, а значение времени восприятия управляющего сигнала установкой будет минимальное. Значение считается правильно подобранным, когда система требует не более одного перерегулирования.
- Произвести тестирование параметров настройки, выставляя различные значения мощности подконтрольной установки.
Настройка ПИД-регулятора
Настройка регулировочного модуля осуществляется в соответствии с тремя требуемыми параметрами:
- запрос управляемого оборудования;
- сигнал задания;
- сигнал обратной связи.
Подробная процедура настройки ПИД-регулятора описана в инструкции по эксплуатации непосредственно для используемого частотного преобразователя.
Параметры доступные для ПИД-регулирования:
Выходной управляющий импульс ПИД-регулятора частотного преобразователя формируется из трёх составляющих сигнала:
- пропорциональное звено;
- интегрирующее звено;
- дифференцирующее звено.
Пропорциональная составляющая
Пропорциональное звено осуществляет усиление отклонения между заданным сигналом и сигналом обратной связи. Это необходимо для соблюдения коррекции пропорционально значению отклонения. При возрастании этого параметра, увеличивается скорость реакции системы на управляющее воздействие сигнала. Чрезмерное превышение значения коэффициента пропорциональности, приведёт к потере стабильности регулировочного процесса и появлению колебаний негативного происхождения.
В процессе формирования значения управляющего сигнала, использование лишь одного пропорционального регулятора невозможно.
“ Пример: При приближении к установленной отметке значения температуры нагревателя, мощность установки будет неизменно снижаться. При падении мощности, приближение к заданной температурной отметке будет происходить, но уже медленнее. В итоге необходимая температура так и не будет достигнута, а мощность установки упадёт до критических значений.
Для предотвращения таких случаев, следует производить настройку дополнительных регуляторов интегрального и дифференциального звена.
Настройка пропорциональной составляющей (П-звена) ПИД-регулятора:
Интегральная составляющая
Интегрирующее звено производит финальную корректировку остаточного отклонения значения пропорциональной составляющей. Соразмерное увеличение коэффициента интегрирования позволит свести остаточное отклонение к нулю. Однако значительное превышение указанного параметра может вызвать всё ту же нестабильность в работе установки, вызванное появлением пагубных колебаний.
Настройка интегральной составляющей (И-звена) ПИД-регулятора:
Дифференциальная составляющая
Дифференцирующее звено повышает степень реагирования оборудования, в результате чего уменьшается время, требуемое на отклик системы. Существенное превышение значения этого коэффициента, способно привести к сбою в работе установки.
Фильтр задержки
Настройка параметров фильтра задержки производится для сглаживания стремительно изменчивых отклонений. Если увеличить задержку — процесс замедлится, и наоборот.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Пт)
Упреждающее регулирование (Feedforward Control)
Не всегда простой ПИД-регулятор в системе с обратной связью может обеспечить требуемое быстродействие из-за возникновения нежелательных колебаний или недопустимо большого перерегулирования. Для улучшения характеристик регулирования применяют комбинированное управление – с обратной связью (closed-loop) и без обратной связи (open-loop). К управляющему воздействию (выходу регулятора) добавляется сигнал упреждающего воздействия, который не зависит от рассогласования, а значит, не может вызвать автоколебания в системе.
Продолжение примера
Если мы доверяем прогнозу погоды, то вместо каскадного управления мы можем реализовать упреждающее регулирование без измерения уличной температуры: читаем прогноз на завтра, задаём уставку +40°С по таймеру времени на завтра на 7 утра.
Если измерить возмущение, то можно подать упреждающее воздействие, которое компенсирует влияние этого возмущения на процесс до того, как начнёт изменяться регулируемый параметр.
Как выбрать
- Температура
- Влажность
- Класс взрывозащиты
- Степень защиты корпуса.
- Тип регулятора
- Дискретный
- 2-х позиционный
- 3-х позиционный
- П-регулятор
- ПИ-регулятор
- ПИД-регулятор.
- Каскадный регулятор (подчинённое управление)
- Упреждающее регулирование (Feedforward Control).



