Схема сброса по включению питания (Power-On Reset — POR) обеспечивает запуск микроконтроллера только по достижении напряжением Vcc безопасного уровня. Как показано на Рис. 24, встроенный таймер, тактируемый встроенным генератором сторожевого таймера, удерживает запуск MCU на некоторое время после достижения граничного напряжения вкючения питания Vpot , не зависящее от скорости нарастания напряжения Vcc (см. Рис. 26).
В Таблице 6 показаны установки битов SUT1 и SUT0 использующихся для установки длительности периода задержки процедуры запуска. Пользователю предоставляется возможность выбора задержки времени запуска. Установка SUT 1/0 = 00, при которой MCU запускается через 5 тактовых циклов, используется при использовании внешнего тактового сигнала, подаваемого на вывод XTAL1. Такая установка обеспечивает быстрый запуск из режимов power down или power save, при условии наличия тактового сигнала в этих режимах. Подробности в разделе Программирование.
Если встроенная задержка запуска достаточна, то RESET может быть подсоединен к Vcc непосредственно или через внешний нагрузочный резистор. Удержанием вывода на низком уровне, во время подачи напряжения, период сброса по включению питания может быть увеличен. Пример такого тактирования приведен на. Рис. 27.
Рис. 25. Начальный запуск MCU. Вывод RESET подключен к Vcc, быстрое нарастание Vcc
Рис. 26. Начальный запуск MCU. Вывод RESET подключен к Vcc, медленное нарастание Vcc
Сисадмин (он же на английском языке sysadmin , system administrator ) — сокращенное наименование профессии, полное название которой на русском языке звучит как системный администратор . Данная профессия в последнее время стала очень популярной для большинства молодых, и не очень, людей, ей обучают, по ней работают, за неё получают хорошие деньги. Связано это с бурным развитием различных компьютерных технологий и их проникновением во все сферы человеческой жизни. Слово сисадмин часто используется в разговорной речи, в вакансиях и резюме при поиске работы, одним словом — везде. Ниже пойдет речь о том, что же представляет из себя профессия системного администратора.
В современных реалиях, системным администратором может называться фактически любой человек, который занимается обслуживанием и поддержанием работы определенной компьютерной сети, включая все её аппаратные и/или программные компоненты, в которую могут входить:
- Персональные компьютеры, как рабочие станции, так и сервера;
- Сетевое оборудование, такое как коммутаторы, маршрутизаторы, фаерволлы и многое другое;
- Веб-сервера, почтовые сервера, сервера баз данных, и прочие.
Так же в определенных случаях, на плечи системного администратора могут лечь обязанности по обеспечению должной информационной безопасности.
В зависимости от своей специализации, системный администратор может заниматься следующими видами деятельности:
- Администратор рабочих станций и серверов чаще всего занимается починкой как аппаратных (вышедшие из строя материнские платы, погоревшие блоки питания), так и программных (не загружается Windows, не печатаются запятые в Word»e. ).
- Администратор корпоративной сети на основе домена Active Directory. Очень популярное занятие, учитывая распространенность операционных систем Windows, а так же необходимость их как-то централизованно контролировать. Такой специалист должен уметь создавать, распределять по группам, редактировать пользователей, выдавать им соответствующие права в домене AD, а так же уметь управлять групповыми политиками для пользователей, их компьютеров и групп, в которых они все состоят.
- Администрирование сетей и сетевого оборудования. В его обязанности входит знание топологии сетей, умение работать как с не настраиваемым, так и с настраиваемым сетевым оборудованием, планирование локальной вычислительной сети, а так же возможность объединения в одну сеть нескольких отдаленных друг от друга рабочих мест, путем настройки NAT»ов и VPN»ов. Не стоит так же забывать и контроле доступа в рамках этой сети, и за её пределами — настройка прокси.
- Администратор веб-сервера, который должен как минимум уметь устанавливать, настраивать и обслуживать один из следующих веб-серверов — Apache, IIS, Nginx, следить за хостингом (который может располагаться как внутри сети организации, так и вне её). Кроме того, хороший администратор должен уметь настроить нормальное распределение ресурсов при высоких нагрузках, кластеризацию и много других специфичных вещей.
- Администрирование почтового сервера так-же является распространенной задачей для сисадмина, в его задачи входит работа с такими популярными решениями как Exim, Microsoft Exchange, Postfix, Sendmail, или корпоративными почтовыми решениями от Google или, например, Yandex. Кроме очевидного контроля за учетными записями (создание, удаление, настройка), так же обязательно уметь настроить антиспам систему и прочее.
- Администратор сайта. В эти обязанности может входить как просто какое-то наполнение содержимым сайта, но раз речь идет о системном администраторе, то по идее он должен уметь и настроить хостинг (в том числе и веб-сервер, о чем уже говорилось выше), установить и настроить нужный сайт, например какую-либо систему управления содержимым (CMS).
- Совсем редко под обязанности системного администратора может попасть задача создания или обслуживания системы видеонаблюдления. В задачах установка и настройка камер, реагирования на различные события, сохранение и воспроизведение записей. Относится к системному администрированию слабо, и часто попадает в его обязанности по совместительству к каким-нибудь другим обязанностям.
За бортом описанных выше занятий системного администратора остались такие возможные вещи, как администрирование баз данных (Microsoft SQL, MySQL и его множественные ответвления, Oracle и т. д.), администрирование 1C (не путать с «программист 1C»), АТС и многое другое.
В одном из ранних уроков мы узнали, что при помощи ШИМ можно изменять скважность сигнала. Тем самым регулировали яркость свечения светодиода. Однако есть более интересный способ, использования широтно-импульсной модуляции.
Итак… Если пропустить генерируемый сигнал через фильтр низких частот, то получится постоянное напряжение.

Так как скважность изменяется от 0 до 0xFF(255), значит у нас будет 255 уровней постоянного напряжения. Проще говоря, есть диапазон напряжения, допустим от 0 до 5В, этот диапазон разбивается на 255 значений. С шагом 5/255=0,0196В можно выставить любое напряжение.
Используя в определенном порядке эти значения, можно получить практически любую форму сигнала. Например, увеличивая заполнение от 0 до 255, а потом уменьшая от 255 до 0 получим пилообразный сигнал.
Теперь перейдем к конкретной цели: получить синусоиду с частотой 50Гц с помощью микроконтроллера Atmega8. Глобальная задача — выставлять через определенные промежутки времени напряжение на выходе ШИМ, по синусоидальному закону.
Разберемся с первой частью задачи. Для того, получить определенные промежутки времени воспользуемся таймером. Допустим таймер настроен на частоту 8МГц, т.е. он будет тикать 8000000 раз в секунду. Синусоида колеблется 50 раз в секунду, значит на один период может приходиться 8000000/50=160000 тиков максимум. Раз у нас 256 уровней напряжения, то и максимальное разрешение синусоиды будет равняться 256.
Что же такое разрешение синуса? В данном случае это количество точек за период по которым построена синусоида. Для примера я построил в Excel, то как будет выглядеть синусоида для разного разрешения.
Для синуса с разрешением 4:

Для синуса с разрешением 8 точек:

Для синуса с разрешением 16 точек:

Думаю «эволюция» синуса наглядно видна — чем больше точек(разрешение), тем меньше угловатостей и тем больше он похож на нормальную синусоиду. В итоге я решил остановиться на разрешении синуса в 128 точек.
Теперь объединяем все сказанное ранее, 160000 тиков делим на разрешение 128 получаем 1250 — через столько тиков должно сработать прерывание, чтобы выставить следующий уровень напряжения. Значение 1250 нужно пихать в регистр сравнения OCR1A
Вторая часть глобальной задачи — как построить синусоиду. Вспомним математику:D… Синус изменяется от -1 до 1. ШИМом сгенерить отрицательное напряжение не получится. Поэтому нужно сместить график над осью Х — sin(x)+1. Теперь он будет изменяться от 0 до 2, тоже не вариант, т.к. у нас 256 значений напряжения, поэтому умножим на 127, чтобы максимальным было значение 256. В итоге откопал такую формулу:
128 — разрешение синуса, х — номер точки по (от 0 до 128). Сосчитал в Excel, получился массив sin из 128 значений, которые по очереди подставляются в OCR2.
Последнее о чем стоит упомянуть — фильтр низких частот, возможно в ближайшее время появится урок по фильтрам. В данный момент, формулы для его расчета не имеет смысла приводить, т.к. есть сайты с возможностью онлайн расчетов, достаточно набрать «фнч» в гугле.
Файл прошивки и протеуса
Подключаемые резисторы (как внутренние, так и внешние), необходимые только для контактов MCU INPUT? Напротив, контакт MCU, сконфигурированный как OUTPUT, «знает, на каком уровне он находится», потому что он управляет — «плавающий» вывод MCU OUTPUT, привязанный к некоторому входу другой схемы, не имеет смысла, поскольку состояние вывода MCU может быть только высоким или низким. у меня это право? Теперь, при загрузке или сбое MCU, может оказаться выгодным, чтобы привязка к линии ввода «MCU output to IC input» была привязана к этому каналу, чтобы гарантировать, что вход в какой-либо IC никогда не плавает.
Может быть, я просто ответил на свой вопрос здесь. резисторы pull-up/down могут использоваться как на входных, так и на выходных контактах, в зависимости от приложения?
Русские Блоги
Двухтактный выход: он может выводить высокие и низкие уровни и подключаться к цифровым устройствам; двухтактная структура обычно означает, что два транзистора управляются двумя дополнительными сигналами, а другой всегда отключается при включении одного транзистора.
Выход с открытым стоком: выходной терминал эквивалентен коллектору триода. Чтобы получить состояние высокого уровня, необходим подтягивающий резистор. Он подходит для токового управления и его способность поглощать ток относительно велика (обычно в пределах 20 мА).
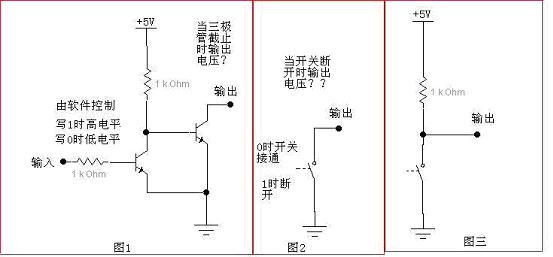
Сначала поговорим о структуре выхода с открытым коллектором. Структура выхода с открытым коллектором показана на рисунке 1. Коллектор транзистора справа не подключен, поэтому он называется открытым коллектором (транзистор слева предназначен для инвертирования, а когда на входе «0», то на выходе также » 0 ”). На рис. 1, когда вход на левом конце равен «0», передний транзистор отключен (то есть коллектор C и эмиттер E эквивалентны отключению), поэтому источник питания 5 В добавляется к правому транзистору через резистор 1 кОм, а к правому транзистору Триод включен (то есть это эквивалентно замкнутому переключателю); когда вход на левом конце равен «1», передний триод включен, а задний триод выключен (эквивалент выключенного переключателя).
Мы упростили рисунок 1, чтобы он выглядел как рисунок 2. Переключатель на Рисунке 2 управляется программным обеспечением: он открыт при «1» и замкнут при «0». Очевидно, что когда переключатель замкнут, выход напрямую заземлен, поэтому выходной уровень равен 0. Когда переключатель выключен, выходной терминал остается плавающим, то есть в состоянии высокого импеданса. В настоящее время состояние уровня неизвестно.Если следующая резистивная нагрузка (даже очень легкая нагрузка) достигнет земли, то выходной уровень будет понижен этой нагрузкой до низкого уровня, поэтому эта схема не может выдавать высокий уровень.
Посмотрите еще раз на рисунок 3. Резистор 1 кОм на рисунке 3 является подтягивающим резистором. Если переключатель замкнут, ток будет течь от резистора 1 кОм и переключателя, но три других порта будут подтягиваться изнутри из-за открытия и закрытия). Когда мы хотим использовать функцию ввода, нам нужно только установить порт вывода на 1, что эквивалентно Переключатель выключен, а порт P0 находится в состоянии высокого импеданса.
Для выхода с открытым стоком (OD) он очень похож на выход с открытым коллектором. Просто замените указанный выше транзистор полевой трубкой. Таким образом, коллектор становится стоком, а OC становится OD. Принцип анализа тот же.
Другая структура вывода — двухтактный вывод. Структура двухтактного выхода заключается в замене верхнего подтягивающего резистора переключателем. При выводе высокого уровня верхний переключатель включен, а нижний переключатель выключен; при выводе низкого уровня все наоборот. По сравнению с OC или OD, эта двухтактная структура имеет сильные характеристики движения на высоких и низких уровнях. Если два выходных порта с разными выходными уровнями соединены вместе, будет генерироваться большой ток, который может сжечь выходные порты. Но упомянутые выше выходы OC или OD не будут иметь такой ситуации, потому что ток, обеспечиваемый подтягивающим резистором, относительно невелик. Если двухтактный выход установлен в состояние с высоким импедансом, два переключателя должны быть отключены одновременно (или использовать передаточный вентиль на выходном порте), чтобы его можно было использовать в качестве входного состояния. Некоторые порты ввода-вывода микроконтроллеров AVR имеют такую структуру.
Особенности и применение схемы с открытым стоком
В схемотехнике мы часто сталкиваемся с концепциями открытого стока и открытого коллектора.
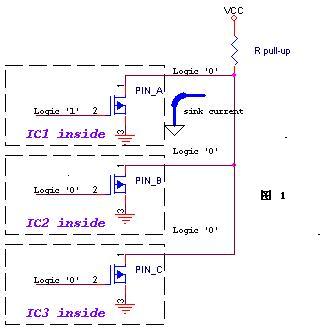
«Сток», упомянутый в так называемой концепции схемы с открытым стоком, относится к стоку полевого МОП-транзистора. Точно так же «сборник» в цепи открытого коллектора относится к коллектору триода. Схема с открытым стоком относится к схеме, которая использует сток полевого МОП-транзистора в качестве выхода. Обычно в цепь вне стока добавляют подтягивающий резистор. Полная схема с открытым стоком должна состоять из устройств с открытым стоком и подтягивающих резисторов с открытым стоком. Как показано на рисунке 1:
Схема с открытым стоком имеет следующие характеристики:
1. Используйте приводную способность внешней схемы, чтобы уменьшить внутренний привод ИС (или управлять нагрузкой, превышающей напряжение источника питания микросхемы). Когда внутренний MOSFET IC включен, ток возбуждения течет от внешнего VCC через R-подтягивание и MOSFET к GND. Внутри ИС требуется только низкий ток управления затвором. Рисунок 1.
2. Вы можете подключить несколько выходных контактов с открытым стоком к одной линии. Форма «и логика» отношений. Как показано на рисунке 1, когда любой из PIN_A, PIN_B и PIN_C становится низким, логика на линии открытого стока становится равной 0. Это также принцип I2C, SMBus и других шин для определения статуса занятости шины. Если используется в качестве выхода, необходимо подключить подтягивающий резистор. Когда подключена емкостная нагрузка, задержка спада — это транзистор в микросхеме, который активно управляется, и скорость относительно высокая; задержка нарастания — это пассивное внешнее сопротивление, которое работает медленно. Если требуется высокая скорость, сопротивление должно быть небольшим, потребляемая мощность будет большим. Поэтому при выборе сопротивления нагрузки необходимо учитывать потребляемую мощность и скорость.
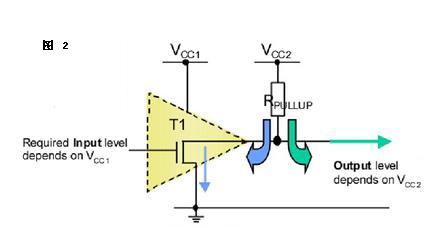
3. Уровень передачи можно изменить, изменив напряжение подтягивающего источника питания. Как показано на рисунке 2, логический уровень ИС определяется источником питания Vcc1, а высокий выходной уровень определяется Vcc2 (напряжение питания подтягивающего резистора). Таким образом, мы можем использовать логику низкого уровня для управления выводом логики высокого уровня (чтобы вы могли выполнять преобразование любого уровня). (Например, добавление подтягивающего резистора может обеспечить выходной уровень TTL / CMOS и т. Д.)
4. Вывод с открытым стоком может выводить только низкий уровень без подключения внешнего подтягивающего резистора (поэтому для порта P0 классического однокристального микрокомпьютера 51 необходимо добавить внешний подтягивающий резистор для функций ввода и вывода, иначе он не сможет выводить высокий уровень. Логика уровня). Вообще говоря, открытый сток используется для подключения устройств разного уровня для соответствия уровню.
5. Стандартный вывод с открытым стоком обычно имеет только выходную мощность. Добавьте другие схемы оценки, чтобы иметь возможность двунаправленного ввода и вывода.
6. Нормальный выходной каскад CMOS — это верхняя и нижняя лампы Снимите верхнюю трубку, чтобы ОТКРЫТЬ-СЛИВ. Основная цель этого вывода двоякая: преобразование уровня и линейное И.
7. Линия и функция в основном используются в ситуации, когда есть несколько цепей для сброса одного и того же сигнала. Если цепь не хочет сбросить, она будет выводить высокий уровень, потому что трубка на ОТКРЫТОМ СЛИВЕ удалена, и высокий уровень Реализуется внешним подтягивающим резистором. (А для обычного выходного каскада CMOS, если один выход высокий, а другой низкий, это равно короткому замыканию источника питания.)
8. OPEN-DRAIN обеспечивает гибкий режим вывода, но у него также есть недостаток — задержка нарастающего фронта. Поскольку нарастающий фронт заряжает нагрузку через внешний подтягивающий пассивный резистор, при небольшом сопротивлении задержка мала, но потребление энергии велико; в противном случае задержка велика, а потребление энергии мало. Поэтому, если требуется задержка, рекомендуется использовать выход по спадающему фронту.
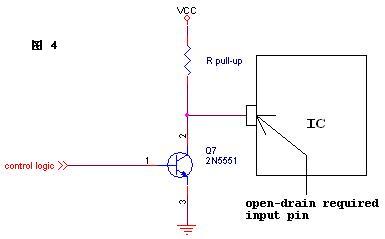
Примечание по применению: 1. Принципы работы с открытым стоком и открытым коллектором схожи Во многих приложениях мы используем схемы с открытым коллектором вместо схем с открытым стоком. Например, требуется, чтобы входной вывод управлялся схемой с открытым стоком. Наш общий метод управления заключается в использовании триода для формирования цепи с открытым коллектором для его управления, что удобно и экономично. Как показано на рисунке 4. Чтобы
2. Сопротивление подтягивающего резистора R pull-up определяет скорость перехода логического уровня. Чем больше сопротивление, тем ниже скорость, тем меньше потребление энергии. наоборот.
Двухтактный выход обычно называют двухтактным выходом, который должен быть более подходящим, чем выход КМОП в схемах КМОП, потому что возможность двухтактного вывода в КМОП не может быть такой большой, как биполярный. Выходная мощность зависит от площади N-образной трубки выходного полюса и P-трубки внутри ИС. По сравнению с выходом с открытым стоком, высокий и низкий уровни двухтактного сигнала определяются низкой мощностью ИС, и простые логические операции не могут выполняться. Двухтактный — наиболее часто используемый метод проектирования выходных каскадов в схемах КМОП.
Конечно, открытый сток не обходится без затрат, это связано с очень плохой выходной мощностью. Неверно сказать, что возможности выходного возбуждения очень плохие, поскольку они зависят от мощности конечного транзистора в ИС. OD только вызывает задержку нарастающего фронта, потому что нарастающий фронт заряжает нагрузку через внешний подтягивающий пассивный резистор.При небольшом сопротивлении задержка будет небольшой, но потребляемая мощность будет большой. Напротив, задержка большая, а энергопотребление мало. OPEN DRAIN обеспечивает гибкий режим вывода, но он также имеет свою цену.Если требуется задержка, рекомендуется использовать вывод с задним фронтом.
Предпосылкой для малого сопротивления и небольшой задержки является то, что принцип выбора сопротивления должен находиться в допустимом диапазоне потребляемой мощности конечного транзистора. Опытные конструкторы не будут выбирать резистор 1 Ом в качестве подтягивающего резистора при использовании логических микросхем. На переднем фронте импульса источник питания заряжает нагрузку через подтягивающий пассивный резистор. Очевидно, что чем меньше сопротивление, тем короче время нарастания. На заднем фронте импульса, помимо разряда нагрузки через активный транзистор, источник питания также подключается через подтягивающий резистор. Транзистор образует путь к земле, и проблема, которую он приносит, заключается в потребляемой мощности и потребляемой мощности микросхемы. Сопротивление влияет на передний фронт, а не на спад. Если вы не заботитесь о нарастающем фронте во время использования, подтягивающий резистор может быть максимально большим, чтобы уменьшить ток в цепи заземления. Если требуется, чтобы время нарастания фронта было большим, выбор размера резистора должен основываться на потребляемой мощности кристалла.
Mcu сигналы. Использование резисторов при выводе и выводе резисторов на входных или выходных выводах MCU. Подключение светодиодной матрицы к NodeMCU
Схема сброса по включению питания (Power-On Reset — POR) обеспечивает запуск микроконтроллера только по достижении напряжением Vcc безопасного уровня. Как показано на Рис. 24, встроенный таймер, тактируемый встроенным генератором сторожевого таймера, удерживает запуск MCU на некоторое время после достижения граничного напряжения вкючения питания Vpot , не зависящее от скорости нарастания напряжения Vcc (см. Рис. 26).
В Таблице 6 показаны установки битов SUT1 и SUT0 использующихся для установки длительности периода задержки процедуры запуска. Пользователю предоставляется возможность выбора задержки времени запуска. Установка SUT 1/0 = 00, при которой MCU запускается через 5 тактовых циклов, используется при использовании внешнего тактового сигнала, подаваемого на вывод XTAL1. Такая установка обеспечивает быстрый запуск из режимов power down или power save, при условии наличия тактового сигнала в этих режимах. Подробности в разделе Программирование.
Если встроенная задержка запуска достаточна, то RESET может быть подсоединен к Vcc непосредственно или через внешний нагрузочный резистор. Удержанием вывода на низком уровне, во время подачи напряжения, период сброса по включению питания может быть увеличен. Пример такого тактирования приведен на. Рис. 27.
Рис. 25. Начальный запуск MCU. Вывод RESET подключен к Vcc, быстрое нарастание Vcc
Рис. 26. Начальный запуск MCU. Вывод RESET подключен к Vcc, медленное нарастание Vcc
Сисадмин (он же на английском языке sysadmin , system administrator ) — сокращенное наименование профессии, полное название которой на русском языке звучит как системный администратор . Данная профессия в последнее время стала очень популярной для большинства молодых, и не очень, людей, ей обучают, по ней работают, за неё получают хорошие деньги. Связано это с бурным развитием различных компьютерных технологий и их проникновением во все сферы человеческой жизни. Слово сисадмин часто используется в разговорной речи, в вакансиях и резюме при поиске работы, одним словом — везде. Ниже пойдет речь о том, что же представляет из себя профессия системного администратора.
В современных реалиях, системным администратором может называться фактически любой человек, который занимается обслуживанием и поддержанием работы определенной компьютерной сети, включая все её аппаратные и/или программные компоненты, в которую могут входить:
- Персональные компьютеры, как рабочие станции, так и сервера;
- Сетевое оборудование, такое как коммутаторы, маршрутизаторы, фаерволлы и многое другое;
- Веб-сервера, почтовые сервера, сервера баз данных, и прочие.
Так же в определенных случаях, на плечи системного администратора могут лечь обязанности по обеспечению должной информационной безопасности.
В зависимости от своей специализации, системный администратор может заниматься следующими видами деятельности:
- Администратор рабочих станций и серверов чаще всего занимается починкой как аппаратных (вышедшие из строя материнские платы, погоревшие блоки питания), так и программных (не загружается Windows, не печатаются запятые в Word»e. ).
- Администратор корпоративной сети на основе домена Active Directory. Очень популярное занятие, учитывая распространенность операционных систем Windows, а так же необходимость их как-то централизованно контролировать. Такой специалист должен уметь создавать, распределять по группам, редактировать пользователей, выдавать им соответствующие права в домене AD, а так же уметь управлять групповыми политиками для пользователей, их компьютеров и групп, в которых они все состоят.
- Администрирование сетей и сетевого оборудования. В его обязанности входит знание топологии сетей, умение работать как с не настраиваемым, так и с настраиваемым сетевым оборудованием, планирование локальной вычислительной сети, а так же возможность объединения в одну сеть нескольких отдаленных друг от друга рабочих мест, путем настройки NAT»ов и VPN»ов. Не стоит так же забывать и контроле доступа в рамках этой сети, и за её пределами — настройка прокси.
- Администратор веб-сервера, который должен как минимум уметь устанавливать, настраивать и обслуживать один из следующих веб-серверов — Apache, IIS, Nginx, следить за хостингом (который может располагаться как внутри сети организации, так и вне её). Кроме того, хороший администратор должен уметь настроить нормальное распределение ресурсов при высоких нагрузках, кластеризацию и много других специфичных вещей.
- Администрирование почтового сервера так-же является распространенной задачей для сисадмина, в его задачи входит работа с такими популярными решениями как Exim, Microsoft Exchange, Postfix, Sendmail, или корпоративными почтовыми решениями от Google или, например, Yandex. Кроме очевидного контроля за учетными записями (создание, удаление, настройка), так же обязательно уметь настроить антиспам систему и прочее.
- Администратор сайта. В эти обязанности может входить как просто какое-то наполнение содержимым сайта, но раз речь идет о системном администраторе, то по идее он должен уметь и настроить хостинг (в том числе и веб-сервер, о чем уже говорилось выше), установить и настроить нужный сайт, например какую-либо систему управления содержимым (CMS).
- Совсем редко под обязанности системного администратора может попасть задача создания или обслуживания системы видеонаблюдления. В задачах установка и настройка камер, реагирования на различные события, сохранение и воспроизведение записей. Относится к системному администрированию слабо, и часто попадает в его обязанности по совместительству к каким-нибудь другим обязанностям.
За бортом описанных выше занятий системного администратора остались такие возможные вещи, как администрирование баз данных (Microsoft SQL, MySQL и его множественные ответвления, Oracle и т. д.), администрирование 1C (не путать с «программист 1C»), АТС и многое другое.
В одном из ранних уроков мы узнали, что при помощи ШИМ можно изменять скважность сигнала. Тем самым регулировали яркость свечения светодиода. Однако есть более интересный способ, использования широтно-импульсной модуляции.
Итак… Если пропустить генерируемый сигнал через фильтр низких частот, то получится постоянное напряжение.
Так как скважность изменяется от 0 до 0xFF(255), значит у нас будет 255 уровней постоянного напряжения. Проще говоря, есть диапазон напряжения, допустим от 0 до 5В, этот диапазон разбивается на 255 значений. С шагом 5/255=0,0196В можно выставить любое напряжение.
Используя в определенном порядке эти значения, можно получить практически любую форму сигнала. Например, увеличивая заполнение от 0 до 255, а потом уменьшая от 255 до 0 получим пилообразный сигнал.
Теперь перейдем к конкретной цели: получить синусоиду с частотой 50Гц с помощью микроконтроллера Atmega8. Глобальная задача — выставлять через определенные промежутки времени напряжение на выходе ШИМ, по синусоидальному закону.
Разберемся с первой частью задачи. Для того, получить определенные промежутки времени воспользуемся таймером. Допустим таймер настроен на частоту 8МГц, т.е. он будет тикать 8000000 раз в секунду. Синусоида колеблется 50 раз в секунду, значит на один период может приходиться 8000000/50=160000 тиков максимум. Раз у нас 256 уровней напряжения, то и максимальное разрешение синусоиды будет равняться 256.
Что же такое разрешение синуса? В данном случае это количество точек за период по которым построена синусоида. Для примера я построил в Excel, то как будет выглядеть синусоида для разного разрешения.
Для синуса с разрешением 4:
Для синуса с разрешением 8 точек:
Для синуса с разрешением 16 точек:
Думаю «эволюция» синуса наглядно видна — чем больше точек(разрешение), тем меньше угловатостей и тем больше он похож на нормальную синусоиду. В итоге я решил остановиться на разрешении синуса в 128 точек.
Теперь объединяем все сказанное ранее, 160000 тиков делим на разрешение 128 получаем 1250 — через столько тиков должно сработать прерывание, чтобы выставить следующий уровень напряжения. Значение 1250 нужно пихать в регистр сравнения OCR1A
Вторая часть глобальной задачи — как построить синусоиду. Вспомним математику:D… Синус изменяется от -1 до 1. ШИМом сгенерить отрицательное напряжение не получится. Поэтому нужно сместить график над осью Х — sin(x)+1. Теперь он будет изменяться от 0 до 2, тоже не вариант, т.к. у нас 256 значений напряжения, поэтому умножим на 127, чтобы максимальным было значение 256. В итоге откопал такую формулу:
128 — разрешение синуса, х — номер точки по (от 0 до 128). Сосчитал в Excel, получился массив sin из 128 значений, которые по очереди подставляются в OCR2.
Последнее о чем стоит упомянуть — фильтр низких частот, возможно в ближайшее время появится урок по фильтрам. В данный момент, формулы для его расчета не имеет смысла приводить, т.к. есть сайты с возможностью онлайн расчетов, достаточно набрать «фнч» в гугле.
Файл прошивки и протеуса
Подключаемые резисторы (как внутренние, так и внешние), необходимые только для контактов MCU INPUT? Напротив, контакт MCU, сконфигурированный как OUTPUT, «знает, на каком уровне он находится», потому что он управляет — «плавающий» вывод MCU OUTPUT, привязанный к некоторому входу другой схемы, не имеет смысла, поскольку состояние вывода MCU может быть только высоким или низким. у меня это право? Теперь, при загрузке или сбое MCU, может оказаться выгодным, чтобы привязка к линии ввода «MCU output to IC input» была привязана к этому каналу, чтобы гарантировать, что вход в какой-либо IC никогда не плавает.
Может быть, я просто ответил на свой вопрос здесь. резисторы pull-up/down могут использоваться как на входных, так и на выходных контактах, в зависимости от приложения?
На каком выводе mcu будет такой сигнал при его работе

Несколько месяцев назад, задавшись целью подключить VGA-монитор для вывода текстовых данных с микроконтроллерной системы сбора информации — я с удивлением обнаружил, что ничего сколько-нибудь «внятного» и доступного для повторения “ на коленке ” по этой теме в Интернете отсутствует.
Конечно, существуют промышленные платы стандарта PC-104, можно кое-что “нарыть” и на www.opencores.org для реализации на FPGA, есть графические контроллеры Fujitsu. кто-то здесь недавно на местной конференции предлагал за 5000$ проект на ACEX ’е. но надо признать — все это страшно далеко от народа..
Хотелось что-то гораздо более “дешевое и сердитое”. Предварительные прикидки показывали, что из наиболее распространенных и достаточно быстродействующих микроконтроллеров подходит продукция фирмы ATMEL.
8-ми битное RISC ядро AVR обеспечивает пиковую производительность порядка 16 MIPS на тактовой частоте 16M H z. Плюс на подходе более скоростные семейства Mega 48,88,168 поддерживающие официальную тактовую частоту 20 MHz .При этом скорость вывода данных через стандартный порт ввода-вывода при FOSC = 16 MHz командами вывода в порт (out port x..) 8 MIPS. К тому же я уже имел достаточный опыт разработки устройств на микроконтроллерах AVR. И я засучил рукава..
Результат своей работы я представляю на ВАШ суд.
Поставленная техническая задача:
Цель которую я поставил для себя, достаточно проста на первый взгляд:
Ограничившись одним корпусом распространенного MCU типа Mega8,16,8535
и т.д. и минимумом внешних элементов сконструировать символьный дисплей-адаптер с разрешением > 15×15 символов, который бы выводил информацию на VGA монитор при стандартных частотах VGA сигнала. Информацию символьный адаптер должен получать через стандартный USART порт микроконтроллера. Частота используемого микроконтроллера стандартная -16M H z.
Данная задача на данный момент успешно решена.Более того — проект несколько расширен и дополнен введением формирования обычного видео ч.б. ( PAL / SECAM ) сигнала. Т.е. в зависимости от положения джампера тип формируемого видео сигнала VGA либо Composite Video .
Фотографии и схемы проекта:
Ниже приводится принципиальная схема простого VGA/ Video адаптера (откорректировано 28.06.2011) :
Принципиальная схема откорректирована, на старой схеме были ПЕРЕПУТАНЫ положение порта PAL-синхронизации и джампера PAL — VGA!Из-за этого в «железе» у многих схема НЕ РАБОТАЛА.
Так все это выглядит в железе, собранном на “коленке” за один час:

А вот что мы получаем на экране монитора:

Технические характеристики VGA-адаптера:
Частота кадровой синхронизации: 60Hz
Скорость обмена UART 19200 bps
Технические характеристики Video -адаптера:
Количество символов: 20 строк по 38 символов
Разрешение матрицы знакогенератора: 8×12 точек
Кодовая таблица знакогенератора: WIN 1251
Формируемый сигнал. Composite Video(PAL/SECAM)
Разрешение: 625 строк (чересстрочная)
Частота кадровой синхронизации: 50Hz
Скорость обмена UART 19200 bps
Тип используемого микроконтроллера: Mega 8, Mega16. Mega32, Mega8535 и т.д.
Тактовая частота микроконтроллера стандартная — 16Mhz
- Для того чтобы избежать искажения изображения при приеме данных через UART, для VGA рекомендуется производить обмен данными с адаптером в течении приблизительно 300-600 мкс после сигнала вертикальной синхронизации VSYNC (во время обратного хода луча по кадру). Объема RAM памяти Mega 8535 (512 байт) не достаточно для формирования Видео сигнала с разрешением 38 x 20 символов.
Алгоритм работы программы:

Пояснения по работе программы:
Алгоритм рендеринга изображения достаточно традиционен, главное ноу-хау проекта в использовании для побитного вывода изображения – сдвигового регистра SPI SPDR через бит MOSI. При этом образуется двухступенчатый конвейер рендеринга:
В то время, как последующий байт для рендеринга выбирается из памяти,
предыдущий байт выводится через сдвиговый регистр SPI SPDR MOSI.


Поскольку данный проект написан на С (WinAVR GCC), он легко масштабируем для увеличения разрешения и частот регенерации дисплея. Так, на микроконтроллерах Mega 48,88,168 поддерживающих официальную тактовую частоту 20 MHz возможно получение разрешения 20 строк по 25-30 символов при абсолютно той же схемотехнике (возможности оверклокинга автор намеренно не рассматривает). Применения проекта не ограничиваются одним лишь терминальным вариантом (смотрите примеры в папке examples ) – не смотря на серьезную загруженность процессора регенерацией дисплея, оставшейся мощности вполне достаточно для организации обработки например нескольких цифровых и аналоговых сигналов и реакции на них, а также выдаче результатов их измерений на дисплей в real — time (охранные системы, АСУТП, КИПиА и т.д.). Автор располагает улучшенными вариантами подобных систем с разрешением символьного дисплея 40 x 24 символов в режиме VGA. работающими в коммерческих изделиях.
Вы можете свободно пользоваться материалами данной публикации в образовательных и некоммерческих целях. Все права на проект зарегистрированы. Перепечатка, публикация в Интернете, журналах, использование в коммерческих приложениях – возможна только после согласования с автором .
Исходники подкорректированы под WinAVR-20090313 portable ( «пофиксена» специфика команд: cbi, sbi, PRG_RDB etc.),
не устранены некоторые warnings, думаю они не критичны.
Компания по производству микроконтроллеров MCU
Фумакс Услуги по производству электроники приводит Производство микроконтроллеров MCUКомпании-производители микроконтроллеров MCU — это компании, которые производят и поставляют микроконтроллеры. Fumax предлагает различные типы микроконтроллеров, такие как 8-битные, 16-битные, 32-битные и т. д., подходящие для различных областей применения.
Продукты обычно имеют такие преимущества, как высокая производительность, низкое энергопотребление, простота программирования и использования.
Некоторые известные компании-производители микроконтроллеров MCU включают Intel, Фумакс, NXP, STMicroelectronics, Texas Instruments и т. д.
Предоставляет продукты для микроконтроллеров, инструменты разработки, библиотеки программного обеспечения и решения, которые помогают разработчикам легче использовать и интегрировать микроконтроллеры.
Похожие сообщения
В десятку крупнейших компаний Китая по разработке интегральных схем входят Fumax, Huawei HiSilicon, Vimicro, Rockchip Microelectronics, Haier Integrated Circuit, BYD Microelectronics, Awinic Electronic Technology, Xinlian Semiconductor, Westcore Microelectronics и Broadcom Integrated Circuit. Fumax Huawei HiSilicon Zhongxing Microelectronics Rockchip Microelectronics Шанхай Haier Integrated Circuit Шэньчжэнь BYD Microelectronics Шанхай Aiwei Electronic Technology Шэньчжэнь Xinlian Semiconductor Сиань Xixin Microelectronics Broadcom […]
Прежде чем приступить к проектированию, производители проектов MCU должны запросить у клиентов некоторую ключевую информацию, чтобы гарантировать, что проект MCU соответствует потребностям и ожиданиям клиента. Спецификация спроса Сценарии применения Спецификации или технические руководства Особые требования Требования к сертификации Производственный цикл и выпуск Бюджет затрат Инструменты разработки и программное обеспечение Стратегия обновления MCU Другая соответствующая информация […]
Сброс по включению питания
Схема сброса по включению питания (Power-On Reset — POR) обеспечивает запуск микроконтроллера только по достижении напряжением Vcc безопасного уровня. Как показано на Рис. 24, встроенный таймер, тактируемый встроенным генератором сторожевого таймера, удерживает запуск MCU на некоторое время после достижения граничного напряжения вкючения питания Vpot , не зависящее от скорости нарастания напряжения Vcc (см. Рис. 26).
В Таблице 6 показаны установки битов SUT1 и SUT0 использующихся для установки длительности периода задержки процедуры запуска. Пользователю предоставляется возможность выбора задержки времени запуска. Установка SUT 1/0 = 00, при которой MCU запускается через 5 тактовых циклов, используется при использовании внешнего тактового сигнала, подаваемого на вывод XTAL1. Такая установка обеспечивает быстрый запуск из режимов power down или power save, при условии наличия тактового сигнала в этих режимах. Подробности в разделе Программирование.
Если встроенная задержка запуска достаточна, то RESET может быть подсоединен к Vcc непосредственно или через внешний нагрузочный резистор. Удержанием вывода на низком уровне, во время подачи напряжения, период сброса по включению питания может быть увеличен. Пример такого тактирования приведен на. Рис. 27.
Рис. 25. Начальный запуск MCU. Вывод RESET подключен к Vcc, быстрое нарастание Vcc
Рис. 26. Начальный запуск MCU. Вывод RESET подключен к Vcc, медленное нарастание Vcc
Рис. 27. Начальный запуск MCU. Внешнее управление состоянием вывода RESET
Лекция №9. Описание выводов микроконтроллера.
Рассмотрим назначение основных блоков и расположение и назначение выводов микроконтроллера. В зависимости от типа корпуса микросхемы количество и нумерация выводов изменяется, но функции, закрепленные за ними, остаются неизменными. Наибольшее распространение имеет корпус типа DIP. Это пластиковый корпус с двухрядным расположением выводов и расстоянием между ними равным 2,54 мм.
АЛУ поддерживает арифметические и логические операции c регистрами, с константами и регистрами. Операции над отдельными регистрами также выполняются в АЛУ.
Кроме регистровых операций, для работы с регистровым файлом могут использоваться доступные режимы адресации, поскольку регистровый файл занимает адреса -$1F в области данных, обращаться к ним можно как к ячейкам памяти.
Пространство ввода состоит из 64 адресов для периферийных функций процессора, таких как управляющие регистры, таймеры/счетчики и другие. Доступ к пространству ввода/вывода может осуществляться непосредственно, как к ячейкам памяти расположенным после регистрового файла ($20-$5F).
Процессоры AVR построены по гарвардской архитектуре с раздельными областями памяти программ и данных. Доступ к памяти программ осуществляется при помощи одноуровневого буфера. Во время выполнения команды, следующая выбирается из памяти программ. Подобная концепция дает возможность выполнять по одной команде за каждый машинный цикл. Память программ — это внутрисистемная загружаемая флэш-память.
При помощи команд относительных переходов и вызова подпрограмм осуществляется доступ ко всему адресному пространству. Большая часть команд AVR имеет размер 16-разрядов, одно слово. Каждый адрес в памяти программ содержит одну 16- или 32-разрядную команду.
При обработке прерываний и вызове подпрограмм адрес возврата запоминается в стеке. Стек размещается в памяти данных общего назначения, соответственно размер стека ограничен только размером доступной памяти данных и ее использованием в программе. Все программы пользователя должны инициализировать указатель стека (SP) в программе выполняемой после сброса (до того как вызываются подпрограммы и разрешаются прерывания). 8-разрядный указатель стека доступен для чтения/записи в области ввода/вывода.
Доступ к 128 байтам статического ОЗУ, регистровому файлу и регистрам ввода/вывода осуществляется при помощи пяти доступных режимов адресации поддерживаемых архитектурой AVR.
Все пространство памяти AVR является линейным и непрерывным.
Гибкий модуль прерываний имеет собственный управляющий регистр в пространстве ввода/вывода, и флаг глобального разрешения прерываний в регистре состояния. Каждому прерыванию назначен свой вектор в начальной области памяти программ. Различные прерывания имеют приоритет в соответствии с расположением их векторов. По младшим адресам расположены векторы с большим приоритетом.
ОПИСАНИЕ ВЫВОДОВ
VCC — вывод источника питания
Port B (PB7..PB0) — Порт B является 8-битовым двунаправленным портом ввода/вывода. Для выводов порта предусмотрены внутренние подтягивающие резисторы (выбираются для каждого бита). Выводы PB0 и PB1 также являются положительным (AIN0) и отрицательным (AIN1) входами встроенного аналогового компаратора. Выходные буферы порта B могут поглощать ток до 20мА и непосредственно управлять светодиодными индикаторами. Если выводы PB0..PB7 используются как входы и извне устанавливаются в низкое состояние, они являются источниками тока, если включены внутренние подтягивающие резисторы. Кроме того Порт B обслуживает некоторые специальные функции, которые будут описаны ниже.
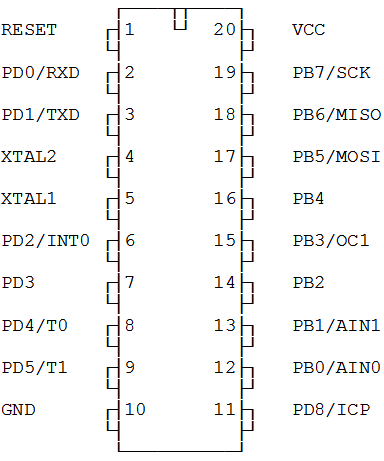
Port D (PD6..PD0) — Порт D является 7-битовым двунаправленным портом с внутренними подтягивающими резисторами. Выходные буферы порта D могут поглощать ток до 20мА. Как входы установленные в низкое состояние, выводы порта D являются источниками тока, если задействованы подтягивающие резисторы. Кроме того Порт D обслуживает некоторые специальные функции, которые будут описаны ниже.
RESET — Вход сброса. Удержание на входе низкого уровня в течение двух машинных циклов (если работает тактовый генератор), сбрасывает устройство.
XTAL1 — Вход инвертирующего усилителя генератора и вход внешнего тактового сигнала.
XTAL2 — Выход инвертирующего усилителя генератора.
Дата добавления: 2016-12-27 ; просмотров: 4520 ;



