Электрическими двигателями называют механизмы, предназначенные для преобразования электрической энергии в механическое движение. Электромоторы сопровождают человека практически во всех сферах его деятельности. Без них невозможно представить современную жизнь. Несмотря на надежность и долговечность, все же случаются поломки и сбои в работе таких устройств. Знание характеристик, особенностей поможет правильно выбирать, обслуживать и при необходимости ремонтировать асинхронные двигатели.
В асинхронных двигателях переменного тока (АД) частота вращения ротора не синхронизирована с частотой магнитного поля, индуцируемого током обмотки статора. От этого принципа произошло определение этой группы электромашин. В синхронных электрических машинах частоты совпадают.
Виды асинхронных двигателей
В настоящее время разработано и применяется множество различных разновидностей АД, которые различаются конструктивно и по характеристикам. Бывают однофазные, двухфазные, трехфазные, многофазные конструкции, которые работают от сети переменного тока. Различается количество полюсов. Применяются модификации с постоянной и переменной частотой тока, последние называются инверторными. По типу ротора различают 2 вида: фазные электродвигатели и с короткозамкнутым ротором. Асинхронные электрические моторы выгодно отличаются от других преобразователей энергии компактностью, долговечностью высоким КПД.
АД распространены очень широко, и являются самым популярным типом электромашин. Асинхронные электродвигатели используют в компрессорах, системах водоснабжения, отопления, кондиционирования, автомобилестроении. Особенно востребованы такие устройства в областях, где требуется точно выдерживать скорость вращения вала, например при производстве полимеров, стеклотканей, проволоки.
Относительно маломощные однофазные агрегаты работают в вентиляторах, маломощной бытовой технике. Более производительные двухфазные агрегаты популярнее, их применяют в приводах стиральных машин, холодильников, иных приборов.
Значительно шире используются трехфазные асинхронные электромашины, в первую очередь в промышленности. Ими оснащают электроприводы станков, подъемных кранов, лифтов, многого другого. Этому способствуют надежность и экономичность электродвигателей.

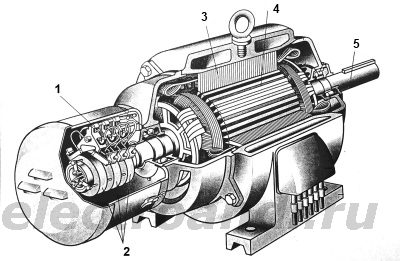
Устройство трехфазного асинхронного двигателя с фазным ротором.
Недостатком асинхронного двигателя с короткозамкнутым ротором является большой пусковой ток, который превышает номинальный ток в 5-7 раз.
Желая улучшить пусковые характеристики асинхронного двигателя, М. О. Доливо-Добровольский разработал двигатель с фазным ротором.
Боярсков Сергей Геннадьевич Электродвигатель с фазным ротором
Асинхронный двигатель с фазным ротором имеет обычный для асинхронных двигателей статор с трехфазной сетевой обмоткой, но на поверхности ротора также находится трехфазная обмотка. Три фазные обмотки ротора соединяются на самом роторе звездой, а свободные их концы соединяются с тремя изолированными друг от друга контактными кольцами, укрепленными на валу машины и изолированными от него (рис. 8.6). Поэтому асинхронный двигатель с фазным ротором называют также асинхронным двигателем с контактными кольцами.
Контактные кольца соприкасаются со щетками, установленными в неподвижных щеткодержателях. Через кольца и щетки обмотка ротора замыкается на пусковой трехфазный реостат, который изменяет активное сопротивление обмотки ротора в момент пуска. Обмотка статора такого двигателя включается непосредственно в трехфазную сеть (рис. 8.7).

Эта система используется либо для пуска (для уменьшения пускового тока при одновременном сохранении вращающего момента), либо для регулирования скорости вращения ротора двигателя. После разгона ротора пусковой реостат выключается, и обмотка закорачивается с помощью специального центробежного автоматического замыкателя. Для уменьшения потерь на трение в некоторых двигателях с фазным ротором имеются приспособления для отвода щеток от контактных колец после их замыкания.
Одним из важнейших достоинств асинхронного двигателя с фазным ротором является то, что в момент пуска создается большой вращающий момент при значительно меньших, чем у короткозамкнутых двигателей, пусковых токах. Объясняется это тем, что асинхронный двигатель при пуске развивает максимальный вращающий момент тогда, когда активное сопротивление ротора будет равно индуктивному сопротивлению двигателя. А так как у двигателей с фазным ротором активное сопротивление ротора можно изменять с помощью пускового реостата, то и пусковые характеристики их значительно лучше, чем у двигателей с короткозамкнутым ротором.
Пуск асинхронного двигателя с фазным ротором производится следующим образом. Пусковой реостат устанавливается на холостую клемму (цепь ротора разомкнута), а на статор подается сетевое напряжение. Затем включается пусковой реостат, и его сопротивление постепенно уменьшают и делают равным нулю, когда двигатель приобретет номинальную скорость. Пусковой ток двигателя с фазным ротором превышает номинальный всего в 1,5-2 раза. Кроме того, включение в цепь ротора пускового реостата значительно увеличивает вращающий момент.
Сущность процесса регулирования скорости асинхронного двигателя с фазным ротором при помощи регулировочного реостата сводится к следующему. Ротор двигателя обладает определенной инерцией, и поэтому сразу после введения
реостата его скорость и индуцируемая в роторе ЭДС Е2 в
начальный момент остаются неизменными. Увеличение сопротивления пускового реостата в цепи ротора вызывает
уменьшение тока ротора 12, что приводит к уменьшению вращающего момента (см. формулу (8.3)). Вследствие этого скорость вращения ротора п2 начнет уменьшаться. Уменыпение скорости п2 аналогично увеличению скольжениям, вследствие чего индуцируемая в роторе ЭДС Е2, пропорциональная s, также начнет расти, вызывая увеличение тока ротора I2. Рост тока I2 и уменьшение скорости вращения ротора п2
будет продолжаться до тех пор, пока ток I2 не достигнет своего прежнего значения. В этом случае вращающий момент снова станет равным статическому, и двигатель начнет вращаться с постоянной скоростью, величина которой будет уже несколько меньше, чем до введения реостата. Регулировка скорости асинхронного двигателя с фазным ротором может осуществляться только в сторону уменьшения оборотов.
Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.

Ротор (4) по сравнению с короткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120. Эти обмотки соединяются с тремя контактными кольцами (2), расположенными на валу (5) ротора. Контактные кольца выполнены из латуни или стали, причем друг от друга они изолированы. С помощью нескольких металлографитовых щеток (обычно двух), которые расположены на щеткодержателе (1) и прижимаются пружинами к кольцам, в цепь вводятся добавочные сопротивления. Выводы обмоток соединяются по схеме «звезда».
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца. Таким образом, удается повысить еще и КПД двигателя.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
Конструкция
Устройство трехфазного асинхронного двигателя с фазным ротором включает 2 главные детали — статор и ротор. Ротор представляет собой движущуюся часть, а статор — фиксированную. Между ними есть воздух.

Конструкция статора включает шихтованный магнитный провод, который запрессован в литую станину. Внутри провода есть пазы, предназначенные для вложения проводников намотки. Они представляют собой стороны мягких катушек с большим количеством витков.
К сведению! Эти катушки создают 3 фазы обмотки статора, поэтому АД называют 3-фазным. Оси катушек находятся под углом 120° относительно друг друга.
Контачат фазы обмотки разными схемами: «звездой» и «треугольником». Выбор схемы зависит от напряжения в электросети. При значении 220 В в спецификациях асинхронного электромотора используется схема «треугольник», при 220/380 В — «звезда».
Ротор является цилиндром, сложенным из круглых листов электротехнической стали. Стопка этих листов насаживается на вал. Есть 2 типа роторов, различающиеся по разновидности обмотки: фазные и короткозамкнутые. Именно фазные используются в мощных асинхронных электрических движках.
Вам это будет интересно План электропроводки квартиры
Где применяется
Большая часть всех электродвигателей, выпускающихся в производственных масштабах, являются асинхронными.

Список сфер, где применяются асинхронные моторы:
- медицинское оборудование;
- техника для записи звука;
- устройства автоматики;
- бытовые приборы.
Обратите внимание! АД применяется там, где нужны высокие мощности, но вместе с тем нет необходимости в плавном регулировании скорости вращения в больших диапазонах.
Такие электромоторы чаще всего используют в тяжелом оборудовании, к примеру, в подъемных кранах, станках, лифтах и прочих подъемниках. Проще говоря, асинхронную машину нужно подключать в тех условиях, где работа производится под нагрузкой.
Способы подключения
Запуск электромотора должен происходить с минимальным скачком тока в обмотках. Для этого применяется 5 основных способов подключения:
- непосредственный — питание подается прямо на контакты электродвигателя через контактор или пускатель, когда падение напряжения не критично;
- снижение напряжения в течение времени старта;
- схема соединения обмоток статора переключается на треугольник со звезды;
- плавный запуск;
- изменение частоты напряжения сети.
Для однофазных версий используют расщепление полюсов, конденсаторный или резисторный пуск. Трехфазные электродвигатели запускаются или напрямую, переключением на треугольник, или посредством преобразователя напряжения, будь то реостат, трансформатор. Применяют изменение числа пар полюсов.
Как обеспечивается регулировка скорости
Регулировать частоту вращения асинхронного двигателя не так просто. Существуют 3 возможности. Можно изменить:
- частоту питающей сети;
- число пар полюсов;
- величину скольжения.
Чтобы изменить число пар полюсов нужно специальным образом заложить обмотку статора. Дальнейшие действия заключаются в возможности переключаться на одну, две или три пары полюсов. Такое переключение будет ступенчатым. Соответственно, дискретно будет меняться и частота вращения ротора асинхронного двигателя. В многополюсных обмотках статора частота выше.
Второй способ — изменить скольжение. Его величина зависит, в том числе, и от сопротивления. Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Однако эти способы не очень экономичны или неудобны. С развитием силовой электроники появился третий, самый действенный способ — изменять частоту питающей сети, для чего служат частотные преобразователи. При плавном изменении частоты питающего тока можно получить непрерывный ряд частот магнитного поля статора асинхронного двигателя в определенном диапазоне, а значит так же плавно изменять скорость вращения вала. Силовая электроника дала АД новый толчок в развитии, их доля превышает 80% всех электродвигателей в мире.
Расчёт числа повторений
Возьмём m1 – процесс повторения постоянного поля магнитов и ротора. Система фазы переменного тока образуют вращение поля магнитов.
Данные расчета считаются по формуле:
f1– частота электричества$
p – количество полюсных пар каждой обмотки статора.
m2 – процесс повторения вращения ротора. Имея различное количество одновременных повторений, данная скорость частоты будет асинхронной. Определение расчёта частоты проводится по соотношению между данными:
Асинхронный электродвигатель работает только при асинхронной частоте.
При одновременном вращении статора и ротора, расчет скольжения будет равняться нулю.
Двухроторный АД используется для привода разных механизмов. Различие двухроторного двигателя заключается присутствием в конструкции двух роторов. Второй ротор выполняет функцию вспомогательную, может вращаться с другой скоростью. Вспомогательный ротор представляет собой внутренний хомут для замыкания постоянного потока магнитов, охлаждения электродвигателя. Недостаток двухмоторного асинхронного двигателя в низком КПД от использования ферромагнитного вспомогательного ротора.
В ходе исследования двухроторных машин достигаются близкие данные скоростик желаемым, когда вспомогательный ротор имеет максимальные вентиляционные зазоры. Полый ротор установлен на ступице, его вал расположен внутри цилиндра. При вращении вспомогательного ротора вентиляция работает по принципу центробежного вентилятора. Для увеличения пускового момента и большей электрической нагрузки полый ротор должен регулироваться, перемещаясь вдоль вала, с установленным штифтом, конец чего входит в паз ступицы ротора.
Данные для расчета:
Реостатный пуск
Часто для включения двигателя безмощных пусковых моментов оказывают нужное действие реостаты. Схема реостатного способа:
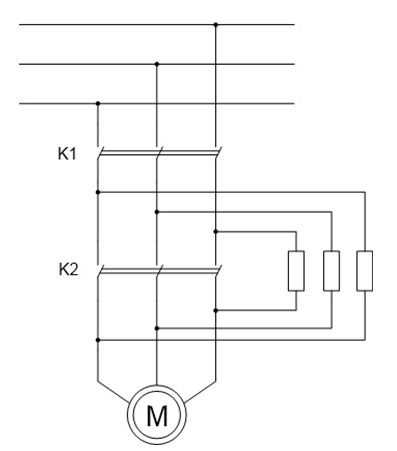
Главной характеристикой метода является присоединение двигателя при пуске к реостатам. Реостаты разрываются (на чертеже К1), на них идет частично электрический ток. Что дает возможность уменьшить пусковые токи. Пусковой момент тоже снижается. Преимущество реостатного способа заключается в снижении нагрузки на механическую часть и нехватку напряжения.
Трехфазный асинхронный электродвигатель

Рис. 1.5 . Асинхронный электродвигатель с фазным ротором: 1 — сердечник ротора; 2 — обмотка ротора; 3 — вал; 4 — подшипниковый щит со стороны привода; 5 — корпус статора; 6 — обмотка статора; 7 — сердечник статора; 8 — коробка выводов; 9 — подшипниковый щит со стороны контактных колец; 10 — рычаг короткозамыкающего приспособления; 11 — щеткодержатели внутри щита 9; 12 — контактные кольца; 13 — смещающееся вдоль вала кольцо короткозамыкающего приспособления
У показанного на рис. 1.5 трехфазного асинхронного электродвигателя с фазным ротором статор устроен так же, как и у двигателя с короткозамкнутым ротором, в то время как ротор имеет существенные конструктивные отличия.
Сердечник 1 ротора представляет собой пакет цилиндрической формы, набранный и спрессованный из отдельных тонких штампованных листов электротехнической стали и насаженный на вал 3. На наружной поверхности сердечника имеются пазы, в которые укладывается трехфазная обмотка 2 из изолированного медного провода. Обмотка фазного ротора, выполняемая по таким же схемам, как и обмотка статора, соединяется, как правило, в звезду, а три ее свободных конца изолированными проводами, проходящими через просверленное внутри вала отверстие, выводятся к укрепленным на валу трем (обычно медным или латунным) контактным кольцам 12, электрически изолированными между собой и от вала.
С вращающимися при работе двигателя контактными кольцами соприкасаются неподвижные щетки, установленные в щеткодержателях 11, которые закреплены на подшипниковом щите 9. К коробке выводов 8, расположенной на корпусе 5 двигателя, подведены шесть концов статора 6. Кроме того, отдельно выведены три конца роторной обмотки 2 (через контактные кольца и щетки). В цепь обмотки ротора, таким образом, можно включить пусковой или регулировочный реостат.
В некоторых выпускавшихся ранее конструкциях асинхронных электродвигателей с фазным ротором имелось короткрзамыкающее устройство, состоящее из рычага 10 с вилкой и подвижного кольца 13, с помощью которых после окончания пуска двигателя и выведения из цепи роторной обмотки пускового реостата все три контактных кольца ротора на ходу электрически соединялись между собой, а щетки поднимались. В настоящее время такие электродвигатели не выпускаются.
Асинхронные электродвигатели с фазным ротором несколько сложнее по устройству, дороже и менее надежны, чем двигатели с короткозамкнутым ротором, поэтому их применяют значительно реже — в приводах с тяжелыми условиями пуска или с повышенными требованиями к их плавности, при необходимости регулирования частоты вращения и т. п.
Переход отечественной электротехнической промышленности на выпуск единых общесоюзных серий электротехнических машин был начат именно с асинхронных электродвигателей, как машин самого широкого, массового применения.



