Целью работы является изучение работы асинхронного двигателя с короткозамкнутым ротором и снятие его механической и рабочей характеристик.
Краткие теоретические сведения
Простота конструкции, надежность в работе, экономичность и невысокая стоимость являются основными причинами широкого использования асинхронных двигателей в промышленности.
Частота вращения магнитного поля статора n 1 определяется по формуле
где f 1 — частота сети, Гц;
р — число пар полюсов.
Разность в частотах вращения ротора n 2 и поля статора n 1 выражают скольжением
Скольжение возрастает с увеличением нагрузки на валу двигателя. У современных двигателей в зависимости от серии и назначения скольжение при номинальной нагрузке составляет 2…8%. При холостом ходе скольжение составляет всего 0,1…0,3%.
Если считать скольжение при номинальной нагрузке s н равным 5%, то можно указать частоты вращения ротора асинхронных двигателей при питании от сети с f = 50 Гц.
| Частота вращения при s н = 5% | Число пар полюсов на статоре |
| Поля статора n 1, обмин | |
| Ротора n 2, обмин |
Асинхронные двигатели малой и средней мощности, благодаря возможности соединения обмоток статора по схеме Y/Δ или Δ/ Y, могут работать при питании от двух соответствующих напряжений 380/220 В.
На заводском щитке двигателя это обозначается как
Простейшим способом пуска в ход двигателя с короткозамкнутым ротором и номинальной мощностью до 100 кВт является непосредственное включение обмотки статора в трехфазную цепь.
Частота вращения ротора двигателя может быть выражена формулой
Электрическая мощность Р 1, потребляемая асинхронным двигателем от сети, расходуется на полезную мощность Р 2 на валу и потери мощности на нагрев обмоток статора и ротора Δ Р э1 и Δ Р э2, потери в магнитопроводе статора и в стали ротора от вихревых токов и на гистерезис Δ Р ст и на потери от трения в подшипниках Δ Р тр.
Таким образом,баланс мощности в двигателе выразится так
Р 1 = Р 2 + Δ Р тр + Δ Р э + Δ Р ст, Вт. (4)
Активная мощность двигателя, потребляемая из сети, вычисляется по формуле
где Р 1ф = U 1ф ∙ I 1 – мощность одной фазы, измеренная ваттметром, Вт.
Механическая мощность, развиваемая на валу двигателя, Р мех складывается из полезной мощности на валу Р 2 и потерь на трение Р тр
Механическая мощность может быть определена по формуле
Р мех = 0,105 М ∙ n 2, Вт, (7)
где М – вращающий момент, Нм;
n 2 – частота вращения ротора, обмин.
Магнитные потери в магнитопроводе статора, т.е. потери в стали Δ Р ст, практически не изменяются при увеличении нагрузки на валу Р 2 и называются постоянными.
С другой стороны, потери на нагрев обмоток статора и ротора, т.е. потери в меди Δ Р э зависят от нагрузки и называются переменными.
Асинхронный двигатель. Механическая характеристика. Лекция №10
Коэффициент полезного действия асинхронного двигателя η определяется как отношение полезной мощности на валу Р 2 к потребляемой из сети Р 1
Полезная мощность двигателя на валу Р 2 может быть определена по формуле
Р 2 = М ∙ ω = М ∙ , Вт (9)
или Р 2 = 0,105 М ∙ n 2, Вт. (10)
где U 1ф, В; I 1ф, А; Cos φф – напряжение, ток и коэффициент мощности фазы двигателя.
Р 1 – потребляемая активная мощность двигателя.
Коэффициент мощности Cos φф зависит от нагрузки на валу двигателя и определяется отношением активной мощности к полной мощности фазы статора двигателя
В лабораторной работе коэффициент мощности Cos φ измеряется непосредственно фазометром, а также может быть вычислен по показаниям ваттметра, вольтметра и амперметра, включенных в фазу двигателя (рис.1).
Основной характеристикой асинхронного двигателя, называемой механической, является зависимость n 2 = f (M), т.е. зависимость частоты вращения ротора двигателя от вращающего момента (рис.1).

Рис.1. Механическая характеристика асинхронного двигателя.
Вращающий момент асинхронного двигателя определяют по формуле
где U 1ф – фазное напряжение обмотки статора, В;
n 1 – синхронная частота вращения магнитного поля статора, об/мин;
s – скольжение;
р – число пар полюсов;
R 1, R 2 ’ , Х к – параметры схемы замещения асинхронного двигателя, Ом (рис.2).
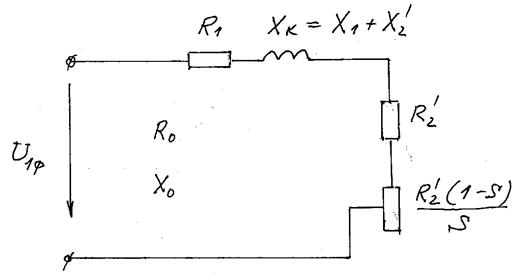
Рис.2. Схема замещения асинхронного двигателя.
Вращающий момент асинхронного двигателя в лабораторной работе измеряется по щкале электромагнитного тормоза, соединенного с валом двигателя, в г∙см (1 Нм = 9800 г∙см).
Вращающий момент асинхронного двигателя зависит от величины подводимого к фазе статора напряжения в квадрате , скольжения s, частоты тока в статоре f 1 и конструктивных параметров двигателя (числа пар полюсов, активного сопротивления обмоток двигателя и т.д.).
Меняя значение скольжения s при остальных постоянных в формуле вращающего момента можно получить различные значения моментов М н, М кр, М п, показанных на естественной механической характеристике (рис.1).
Номинальный вращающий момент М н может быть определен по формулам
М н = 9,55 , Нм (14)
М н = 9,55 , Нм (15)
В каталоге на асинхронные двигатели указаны паспортные данные: Р 2н, U 1н, s н, n 2н, М н, М кр/ М н, Сos φн и способ соединения обмоток статора.
Наиболее полно и наглядно свойства асинхронного двигателя выявляются с помощью рабочих характеристик.
К рабочим характеристикам относятся зависимость частоты вращения ротора n 2, вращающего момента М, скольжения s тока фазы статора I 1ф, коэффициента мощности Сos φ и к.п.д. двигателя от полезной мощности на валу Р 2 при U 1 = Const и f 1 = Const.
При повышении Р 2 величина скольжения s увеличивается, т.к. при увеличении нагрузки на валу частота вращения ротора уменьшается (рис.3).
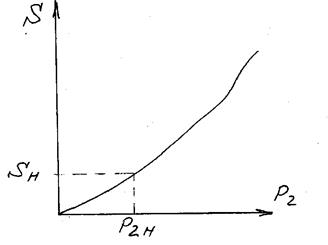
Рис.3. Зависисмость величины скольжения от полезной мощности на валу.
При холостом ходе, когда Р 2 = 0, частота вращения ротора n 2 может быть принята равной частоте вращения магнитного поля статора n 1 и s = 0.
Так как Р 2 ≈ Р мех , а Р мех = 0,105 М ∙ n 2, то рабочая характеристика
n 2 = f (Р 2) подобна механической характеристике (рис.4).
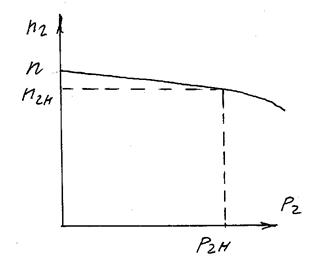
Рис.4. Механическая характеристика асинхронного двигателя.
Вращающий момент М на валу ротора можно считать состоящим из полезного момента, расходуемого на совершение полезной работы, и момента холостого хода М 0, расходуемого на преодоление трения. Эта доля вращающего момента практически не зависит от нагрузки на валу Р 2.
Таким образом, можно считать, что М ≈ . Если бы частота вращения ротора была постоянной, то рабочая характеристика была бы линейно возрастающей. В действительности же частота вращения ротора n 2 уменьшается при увеличении Р 2, в связи с этим характеристика М = f (Р 2) нелинейна и вращающий момент М быстро нарастает с увеличением Р 2 (рис.5).
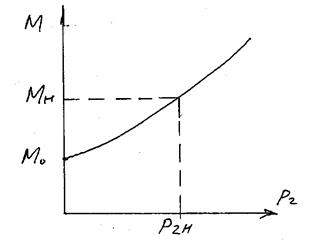
Рис.5. Зависимость М = f (Р 2)
Кривая I 1ф = f (Р 2) подобна рабочей характеристике М = f (Р 2) (рис.6).
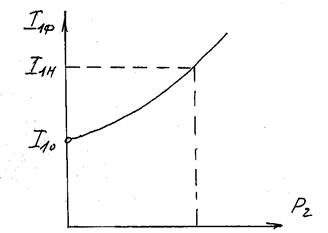
Рис.5. Зависимость I 1ф = f (Р 2)
Если не учитывать ток холостого хода двигателя, составляющий 7…8% от I 1ф, то ток в фазе статора пропорционален полезной мощности Р 2 и увеличивается при ее повышении. При холостом ходе Р 2 = 0 и I 1ф = I 10 (рис. 5).
При холостом ходе двигателя коэффициент мощности Cos φ двигателя мал и обычно не превышает 0,2, но затем при увеличении нагрузки на валу Р 2 он быстро растет и достигает максимума при мощности, близкой к номинальной (рис. 6). Это происходит потому, что при возрастании нагрузки активная мощность Р 1, потребляемая из сети, увеличивается, а реактивная мощность Q 1 почти не изменяется. Вследствие этого главный магнитный поток практически остается постоянным. При нагрузках больше номинальных Cos φ снижается в связи со значительным ростом реактивных мощностей, связанных с влиянием потоков рассеяния.
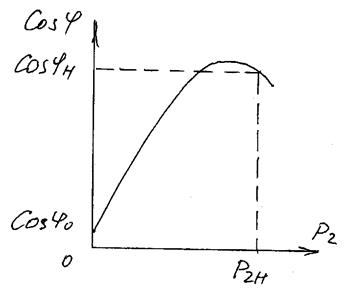
Рис.6. Зависимость Cos φ = f (Р 2)
Анализируя зависимость η = f (Р 2), можно видеть, что при изменении нагрузки на валу Р 2 постоянные потери Δ Р тр и Δ Р ст практически не изменяются, а начальный момент увеличение потерь в активном сопротивлении обмоток Δ Р э значительно меньше роста полезной мощности на валу. При Р 2 = Р 2н постоянные потери Δ Р тр и Δ Р ст становятся равными переменным Δ Р э, а доля потерь в энергетическом балансе уже становится соизмеримой с Р 2. Вследствие этого к.п.д. начинает несколько уменьшаться (рис. 7).
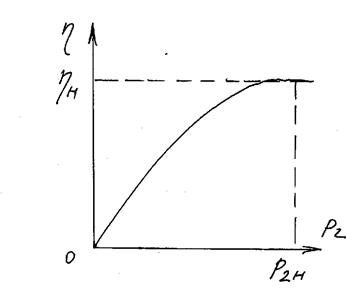
Рис.7. Зависимость η = f (Р 2)
План работы.
1. Ознакомиться с конструкцией асинхронного двигателя, типами измерительных приборов, устройством электромагнитного тормоза. В форму, предусмотренную отчетом по лабораторной работе, записать технические данные используемых приборов и электрооборудования.
2. Собрать электрическую схему (рис. 8) и предъявить ее для проверки преподавателю или лаборанту.
3. После проверки схемы поставить регулятор автотрансформатора (АТ) в положение «0» и включить выпрямитель.
4. Включить фототахометр и нажать кнопку «Пуск» на электрическом стенде.
5. При помощи автотрансформатора (АТ) изменить момент сопротивления электромагнитного тормоза в пределах 0…0,01 Нм (0,100.200,300,400,500,600,700,800,900,1000 г∙см).
6. Измерить по приборам следующие величины: напряжение на фазе двигателя U 1ф по вольтметру V, ток в фазе I 1ф по амперметру А1, потребляемую фазой двигателя активную мощность P 1ф по ваттметру W, частоту вращения ротора n по фототахометру.
Измерения произвести для 11 различных моментов сопротивления на валу двигателя.
Данные опытов внести в табл.2.
| № п/п | Измеренные величины | Вычисленные величины | |||||||||
| М Нм | U 1ф В | I 1ф А | P 1ф Вт | n 2 об/мин | Cos φ | М Нм | P 2 Вт | P 1 Вт | S 1 ВА | Cos φ | s |
| … |
7. По окончании измерений нажать кнопку «Стоп», обесточить схему и показать результаты преподавателю.
8. После получения разрешения преподавателя разобрать схему.
9. По измеренным данным вычислить вращающий момент на валу двигателя М, Нм; полезную мощность на валу P 2, Вт; активную мощность, потребляемую двигателем P 1, Вт; полную мощность, потребляемую двигателем S 1; скольжение s; коэффициент мощности Cos φ и коэффициент полезного действия η.
10. По измеренным и вычисленным данным построить на миллиметровой бумаге характеристики двигателя:
а) механическую характеристику n 2 = f (M);
б) рабочие характеристики s = f (Р 2); n 2 = f (Р 2); M = f (Р 2); I 1ф = f (Р 2).
в) рабочую характеристику Cos φ = f (Р 2), измеренную и вычисленную.
11. Материалы измерений и вычислений, полученные характеристики оформить в виде отчета по лабораторной работе.
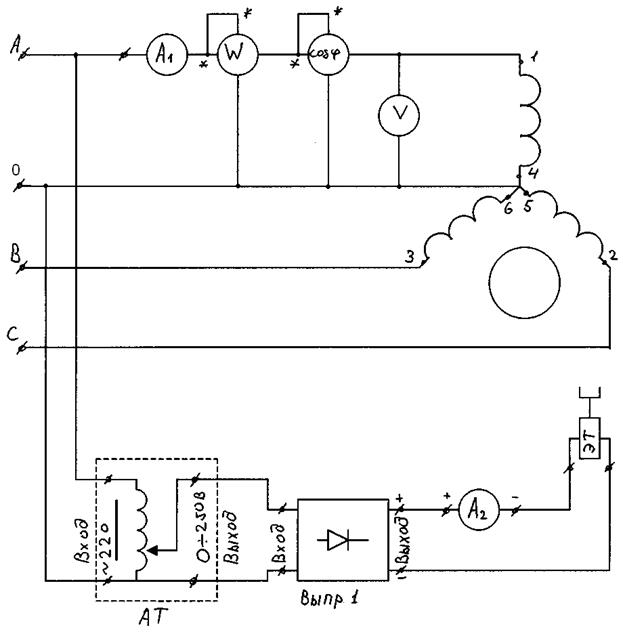
Рис. 8. Электрическая схема исследования трехфазного асинхронного двигателя с короткозамкнутым ротором:
А1 – амперметр переменного тока на 1 А; А2 – амперметр постоянного тока на 1 А; W – ваттметр на 150 Вт; Ф – фазометр на 127 В 5 А в положении «приемник»; V – вольтметр переменного тока на 150 В; АТ – автотрансформатор; ЭТ – электромагнитный тормоз.
Контрольные вопросы
1. Устройство и принцип работы асинхронного двигателя.
2. Что такое скольжение (s хх, s пуск)?
3. Почему двигатель называется асинхронным?
4. Условие возникновения вращающегося магнитного поля.
5. Стандартные величины n 1 (частота вращения магнитного
6. Режим холостого хода асинхронного двигателя.
7. Почему I xx асинхронного двигателя больше чем I 0 трансформатора.
8. Схема замещения асинхронного двигателя в режиме холостого хода.
9. Упрощенная схема замещения.
10.Почему I пуск асинхронного двигателя в 6…8 раз больше I н?
11.Механическая характеристика асинхронного двигателя n = f (M); n = f (s) (естественная и реостатная).
13.Регулирование числа оборотов асинхронного двигателя.
14.Достоинства и недостатки каждого метода.
15.Типы роторов (короткозамкнутый и фазный).
16.Предназначение фазного ротора.
17.Метод ограничения I пуск у асинхронного двигателя с короткозамкнутым ротором.
18. Метод ограничения I пуск у асинхронного двигателя с фазным ротором.
19.Энергетическая диаграмма. Потери мощности в асинхронном двигателе.
20.КПД асинхронного двигателя.
21.Достоинства и недостатки асинхронного двигателя.
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями:
Основные характеристики асинхронных электродвигателей
Наибольшее распространение имеет трехфазный асинхронный электродвигатель. Электродвигатели постоянного тока и синхронные применяются редко.
Большинство электрифицированных машин нуждаются в приводе мощностью от 0,1 до 10 кВт, значительно меньшая часть — в приводе мощностью в несколько десятков кВт. Как правило, для привода рабочих машин используются короткозамкнутые трехфазные электродвигатели. По сравнению с фазным такой электродвигатель имеет более простую конструкцию, меньшую стоимость, большую надежность в эксплуатации и простоту в обслуживании, несколько более высокие эксплутационные показатели (коэффициент мощности и коэффициент полезного действия), а при автоматическом управлении требует простой аппаратуры. Недостаток короткозамкнутых электродвигателей — относительно большой пусковой ток. При соизмеримости мощностей трансформаторной подстанции и электродвигателя его пуск сопровождается заметным снижением напряжения сети, что усложняет как пуск самого двигателя, так и работу соседних токоприемников.
Наряду с трехфазными асинхронными короткозамкнутыми электродвигателями основного исполнения применяются также отдельные модификации этих двигателей: с повышенным скольжением, многоскоростные, с фазным ротором, с массивным ротором и т. д. Электродвигатели с фазным ротором применяют и в тех случаях, когда мощность питающей сети недостаточна для пуска двигателя с короткозамкнутым ротором.
Механические характеристики асинхронных электродвигателей с короткозамкнутым ротором в значительной мере зависят от формы и размеров пазов ротора, а также от способа выполнения роторной обмотки. По этим признакам
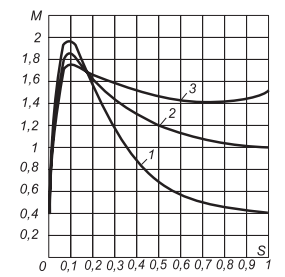
Рис. 1. Кривые моментов M = f(S) асинхронных электродвигателей
различают электродвигатели с нормальным ротором (нормальная беличья клетка), с глубоким пазом и с двумя клетками на роторе. Конструкция ротора короткозамкнутых асинхронных электродвигателей общего назначения мощностью свыше 500 Вт предопределяет явление вытеснения тока в обмотке, эквивалентно увеличению ее активного сопротивления. Поэтому, а также вследствие насыщения магнитных путей потоков рассеивания такие электродвигатели (в первую очередь обмотки ротора) обладают переменными параметрами и аналитические выражения их механических характеристик усложняются. Увеличение активного сопротивления ротора в период пуска вызывает увеличение начального пускового момента при некотором снижении силы начального пускового тока (рис. 1).
Основные характеристики электродвигателей
Номинальный режим электродвигателя соответствует данным, указанным на его щитке (паспорте). В этом режиме двигатель должен удовлетворять требованиям, установленным ГОСТом.
Существует восемь различных режимов работы, из них основными можно считать:
· продолжительный номинальный режим;
· кратковременный номинальный режим с длительностью рабочего периода 10, 30 и 90 мин;
· повторно-кратковременный номинальный режим с продолжительностью включения (ПВ) 15, 25, 40, 60%, с продолжительностью одного цикла не более 10 мин.
Номинальной мощностью Рн электродвигателя называется указанная на щитке полезная механическая мощность на валу при номинальном режиме работы. Номинальная мощность выражается в Вт или кВт.
Номинальная частота вращения nн вала электродвигателя называется указанное на щитке число оборотов в минуту, соответствующее номинальному режиму.
Номинальный момент вращения — момент, развиваемый двигателем на валу при номинальной мощности и номинальной частоте вращения:
Мн — номинальный момент вращения, Н·м (1 кгс·м = 9,81 Н·м ≈ 10 Н·м);
Рн — номинальная мощность, кВт;
nн — номинальная частота вращения, об/мин.
Номинальный к.п.д. hн электродвигателя — отношение его номинальной
мощности к мощности, потребляемой им из сети при номинальном напряжении:
Рн — номинальная мощность, кВт;
Uн — номинальное (линейное) напряжение, В;
Iн — номинальная сила тока, А;
cosφн — номинальный коэффициент мощности.
Номинальной силой тока электродвигателя называется сила тока, соответствующая номинальному режиму. Действительное значение силы тока при номинальном режиме может отличаться от указанного на щитке электродвигателя в пределах установленных допусков для к.п.д. и коэффициента мощности.
Максимальный вращающий момент электродвигателя — наибольший вращающий момент, развиваемый при рабочем соединении обмоток и постепенном повышении момента сопротивления на валу сверх номинального при условии, что напряжение на зажимах двигателя и частота переменного тока остаются неизменными и равными номинальным значениям.
Начальный пусковой вращающий момент электродвигателя — момент вращения его при неподвижном роторе, номинальных значениях напряжения и частоты переменного тока и рабочем соединении обмоток.
Минимальным вращающим моментом электродвигателя в процессе пуска называется наименьший вращающий момент, развиваемый двигателем при рабочем соединении обмоток и частоте вращения в пределах от нуля до значения, соответствующего максимальному вращающему моменту (напряжение на зажимах двигателя и частота переменного тока должны оставаться неизменными и равными их номинальным значениям).
Номинальная частота вращения вала электродвигателя является следующим за мощностью параметром, от которого в значительной мере зависят конструктивное оформление, габариты, стоимость и экономичность работы электропривода. Наиболее приемлемыми в диапазоне мощностей от 0,6 до 100 кВт являются частоты вращения 3000, 1500 и 1000 об/мин (синхронные). Электродвигатели с частотой вращения 750 об/мин (восьмиполюсные) малых мощностей имеют низкие энергетические показатели. При одинаковой мощности электродвигатели с более высокой частотой вращения имеют более высокие значения к.п.д. и cosφ, а также меньшие размеры и массу, что определяет их меньшую стоимость.
Сила тока холостого хода I0 в значительной мере определяется силой намагничивающего тока I0Р. приближенно можно считать I0 = I0P . Для машин
основного исполнения относительное значение силы тока холостого хода
I0 = (0,2—0,6)Iн (оно тем больше, чем меньше номинальная частота вращения и мощность электродвигателя). Зависимость тока холостого хода от частоты вращения электродвигателя приведена в таблице 2.1.
Таблица 2.1. Токи холостого хода для двигателей основного исполнения
Среднее значение токов холостого хода
(в долях от силы номинального тока) при синхронной частоте вращения, об/мин
§79. Характеристики асинхронных двигателей

Для правильной эксплуатации асинхронного двигателя необходимо знать его характеристики: механическую и рабочие.
Механическая характеристика.
Зависимость частоты вращения ротора от нагрузки (вращающегося момента на валу) называется механической характеристикой асинхронного двигателя (рис. 262, а). При номинальной нагрузке частота вращения для различных двигателей обычно составляет 98—92,5 % частоты вращения n1 (скольжение sном = 2 – 7,5 %). Чем больше нагрузка, т. е. вращающий момент, который должен развивать двигатель, тем меньше частота вращения ротора.
Как показывает кривая на рис. 262, а, частота вращения асинхронного двигателя лишь незначительно снижается при увеличении нагрузки в диапазоне от нуля до наибольшего ее значения. Поэтому говорят, что такой двигатель обладает жесткой механической характеристикой.
Наибольший вращающий момент Mmax двигатель развивает при некотором скольжении skp, составляющем 10—20%. Отношение Mmax/Mном определяет перегрузочную способность двигателя, а отношение Мп/Мном — его пусковые свойства.

Рис. 262. Механические характеристики асинхронного двигателя: а — естественная; б — при включении пускового реостата
Двигатель может устойчиво работать только при обеспечении саморегулирования, т. е. автоматическом установлении равновесия между приложенным к валу моментом нагрузки Мвн и моментом М, развиваемым двигателем. Этому условию соответствует верхняя часть характеристики до достижения Mmax (до точки В).
Если нагрузочный момент Мвн превысит момент Mmax, то двигатель теряет устойчивость и останавливается, при этом по обмоткам машины будет длительно проходить ток в 5—7 раз больше номинального, и они могут сгореть.
При включении в цепь обмоток ротора пускового реостата получаем семейство механических характеристик (рис. 262,б). Характеристика 1 при работе двигателя без пускового реостата называется естественной. Характеристики 2, 3 и 4, получаемые при подключении к обмотке ротора двигателя реостата с сопротивлениями R1п (кривая 2), R2п (кривая 3) и R3п (кривая 4), называют реостатными механическими характеристиками.
При включении пускового реостата механическая характеристика становится более мягкой (более крутопадающей), так как увеличивается активное сопротивление цепи ротора R2 и возрастает sкp. При этом уменьшается пусковой ток. Пусковой момент Мп также зависит от R2. Можно так подобрать сопротивление реостата, чтобы пусковой момент Мп был равен наибольшему Мmax.
В двигателе с повышенным пусковым моментом естественная механическая характеристика приближается по своей форме к характеристике двигателя с включенным пусковым реостатом. Вращающий момент двигателя с двойной беличьей клеткой равен сумме двух моментов, создаваемых рабочей и пусковой клетками.
Поэтому характеристику 1 (рис. 263) можно получить путем суммирования характеристик 2 и 3, создаваемых этими клетками. Пусковой момент Мп такого двигателя значительно больше, чем момент М’п обычного короткозамкнутого двигателя. Механическая характеристика двигателя с глубокими пазами такая же, как и у двигателя с двойной беличьей клеткой.

Рис. 263. Механическая характеристика асинхронного двигателя с повышенным пусковым моментом (с двойной беличьей клеткой)
Рабочие характеристики.
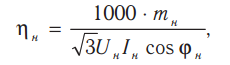
Рабочими характеристиками асинхронного двигателя называются зависимости частоты вращения n (или скольжения s), момента на валу М2, тока статора I1 коэффициента полезного действия η и cosφ1, от полезной мощности Р2 = Рmx при номинальных значениях напряжения U1 и частоты f1 (рис. 264).

Рис. 264. Рабочие характеристики асинхронного двигателя
Они строятся только для зоны практической устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10—20%. Частота вращения n с ростом отдаваемой мощности Р2 изменяется мало, так же как и в механической характеристике; вращающий момент на валу М2 пропорционален мощности Р2, он меньше электромагнитного момента М на значение тормозящего момента Мтр, создаваемого силами трения.
Ток статора I1, возрастает с увеличением отдаваемой мощности, но при Р2 = 0 имеется некоторый ток холостого хода I0. К. п. д. изменяется примерно так же, как и в трансформаторе, сохраняя достаточно большое значение в сравнительно широком диапазоне нагрузки.
Наибольшее значение к. п. д. для асинхронных двигателей средней и большой мощности составляет 0,75—0,95 (машины большой мощности имеют соответственно больший к. п. д.). Коэффициент мощности cosφ1 асинхронных двигателей средней и большой мощности при полной нагрузке равен 0,7—0,9.
Следовательно, они загружают электрические станции и сети значительными реактивными токами (от 70 до 40% номинального тока), что является существенным недостатком этих двигателей.
При нагрузках 25—50 % номинальной, которые часто встречаются при эксплуатации различных механизмов, коэффициент мощности уменьшается до неудовлетворительных с энергетической точки зрения значений (0,5—0,75).
При снятии нагрузки с двигателя коэффициент мощности уменьшается до значений 0,25—0,3, поэтому нельзя допускать работу асинхронных двигателей при холостом ходе и значительных недогрузках.
Работа при пониженном напряжении и обрыве одной из фаз.
Понижение напряжения сети не оказывает существенного влияния на частоту вращения ротора асинхронного двигателя. Однако в этом случае сильно уменьшается наибольший вращающий момент, который может развить асинхронный двигатель (при понижении напряжения на 30% он уменьшается примерно в 2 раза). Поэтому при значительном падении напряжения двигатель может остановиться, а при низком напряжении — не включиться в работу.
На э. п. с. переменного тока при уменьшении напряжения в контактной сети соответственно уменьшается и напряжение в трехфазной сети, от которой питаются асинхронные двигатели, приводящие во вращение вспомогательные машины (вентиляторы, компрессоры, насосы).
Для того чтобы обеспечить нормальную работу асинхронных двигателей при пониженном напряжении (они должны нормально работать при уменьшении напряжения до 0,75Uном), мощность всех двигателей вспомогательных машин на э. п. с. берется примерно в 1,5—1,6 раза большей, чем это необходимо для привода их при номинальном напряжении.
Такой запас по мощности необходим также из-за некоторой несимметрии фазных напряжений, так как на э. п. с. асинхронные двигатели питаются не от трехфазного генератора, а от расщепителя фаз.
При несимметрии напряжений фазные токи двигателя будут неодинаковы и сдвиг между ними по фазе не будет равен 120°. В результате по одной из фаз будет протекать больший ток, вызывающий увеличенный нагрев обмоток данной фазы. Это заставляет ограничивать нагрузку двигателя по сравнению с работой его при симметричном напряжении.
Кроме того, при несимметрии напряжений возникает не круговое, а эллиптическое вращающееся магнитное поле и несколько изменяется форма механической характеристики двигателя. При этом уменьшаются его наибольший и пусковой моменты.
Несимметрию напряжений характеризуют коэффициентом несимметрии, который равен среднему относительному (в процентах) отклонению напряжений в отдельных фазах от среднего (симметричного) напряжения. Систему трехфазных напряжений принято считать практически симметричной, если этот коэффициент меньше 5 %.
При обрыве одной из фаз двигатель продолжает работать, но по неповрежденным фазам будут протекать повышенные токи, вызывающие увеличенный нагрев обмоток; такой режим не должен допускаться. Пуск двигателя с оборванной фазой невозможен, так как при этом не создается вращающееся магнитное поле, вследствие чего ротор двигателя не будет вращаться.
Использование асинхронных двигателей для привода вспомогательных машин э. п. с. обеспечивает значительные преимущества по сравнению с двигателями постоянного тока. При уменьшении напряжения в контактной сети частота вращения асинхронных двигателей, а следовательно, и подача компрессоров, вентиляторов, насосов практически не изменяются. В двигателях же постоянного тока частота вращения пропорциональна питающему напряжению, поэтому подача этих машин существенно уменьшается.
Механическая характеристика асинхронного двигателя
В данной статье осветим тему механических и электрических характеристик электродвигателей. На примере асинхронного двигателя рассмотрим такие параметры как мощность, работа, КПД, косинус фи, вращающий момент, угловая скорость, линейная скорость и частота. Все эти характеристики оказываются важными при проектировании оборудования, в котором электродвигатели служат в качестве приводных. Механические характеристики электродвигателя представляют собой зависимость угловой скорости ω от развиваемого им момента на валу, т.е. ω = f (M). Различают естественные и искусственные механические характеристики электродвигателя. Естественная механическая характеристика соответствует работе электродвигателя с номинальными параметрами при нормальной схеме включения. Искусственная механическая характеристика соответствует работе электродвигателя с параметрами, отличающимися от номинальных, например, при введении сопротивления, изменении питающего напряжения, частоты и др. Асинхронные двигатели являются основными двигателями, которые наиболее широко используются как в промышленности, так и в агропромышленном производстве. Они обладают существенными преимуществами перед другими типами двигателей: просты в эксплуатации, надежны и имеют низкую стоимость. В трехфазном асинхронном двигателе при подключении обмотки статора к сети трехфазного переменного напряжения создается вращающееся магнитное поле, которое, пересекая проводники обмотки ротора, наводит в них ЭДС, под воздействием которой в роторе появляются ток и магнитный поток. Взаимодействие магнитных потоков статора и ротора создает вращающий момент двигателя. Появление в обмотке ротора ЭДС, следовательно, и вращающего момента возможно только при наличии разности между скоростями вращения магнитного поля статора и ротора. Это различие в скоростях называют скольжением.
Механической характеристикой называется зависимость частоты вращения ротора двигателя или скольжения от момента, развиваемого двигателем при установившемся режиме работы.
n= f(М) или s = f(M). Механическая характеристика является одной из важнейших характеристик двигателя. При выборе двигателя к производственному механизму из множества двигателей с различными механическими характеристиками выбирают тот, механическая характеристика которого удовлетворяет требованиям механизма. Уравнение механической характеристики асинхронного двигателя может быть получено на основании формулы (10.41) и схемы замещения. С помощью схемы замещения (см. рис. 10.17) определяют приведенный ток фазы ротора: (10.49)
| I’2 = | U1ф | , | |||
| √ | (r1 + | r’2 | ) + (x1 + x’2)2 | ||
| s | |||||
| r’2 | = r’2 + | r’2(1 — s) | . |
| s | s |
Полученное значение тока I’2 nподставляют в уравнение момента (10.41), в котором предварительно I2 и r2 заменяют через их приведенные значения: (10.50)
| M = | 3I22r2 | = | 3I’22r’2 | . |
| ω0s | ω0s |
После подстановки получим (10.51)
| M = | 3U1ф2r’2 | = | ||
| ω0s [(r1 + | r’ | )2 + (x1 + x’2)2] | ||
| s | ||||
Выражение (10.51) представляет собой уравнение механической характеристики, поскольку оно связывает момент и скольжение двигателя. Остальные входящие в уравнение величины: напряжение сети и параметры двигателя — постоянны 1 и не зависят от s и М. Располагая параметрами двигателя, можно рассчитать и построить его механическую характеристику, которая будет иметь вид, изображенный на рис. 10.18. 1 Сопротивление r2 зависит от частоты f2 и, следовательно, от s, но для двигателей общего назначения изменение r2 незначительно. Однако необходимо отметить, что после включения двигателя в нем происходят сложные переходные электромагнитные процессы. В тех случаях, когда время разбега оказывается соизмеримым с временем электромагнитных процессов, механическая характеристика двигателя в период разбега может существенно отличаться от статической. Одной из важных точек характеристики, представляющей интерес при анализе работы и выборе двигателя, является точка, где момент, развиваемый двигателем, достигает наибольшего значения. Эта точка имеет координаты nкр , sкр , Mmax . Значение критического скольжения sкр , при котором двигатель развивает максимальный (критический) момент Мmax, легко определить, если взять производную dM/ds выражения (10.51) и приравнять ее нулю. После дифференцирования и последующих преобразований выражение sкр будет иметь следующий вид: (10.52)
| sкр = ± | r’2 | . |
| √r12 + xк2 |
где хк = x1 + х’2. Подставив sкр вместо s в уравнение (10.51), получим выражение максимального момента (10.53)
| Мmax = | 3U1ф2 | . |
| 2ω0(r1 ± √r12 + xк2) |
Необходимо отметить, что из выражений (10.51) — (10.53) вытекает следующее.
Момент, развиваемый двигателем, при любом скольжении пропорционален квадрату напряжения. Максимальный момент пропорционален квадрату напряжения и не зависит от сопротивления цепи ротора. Критическое скольжение пропорционально сопротивлению цепи ротора и не зависит от напряжения сети. Полученные выражения удобны для анализа, однако из-за отсутствия в каталогах параметров r1, х1, х2 их использование для расчетов и построения характеристик затруднено.
В практике обычно пользуются уравнением механической характеристики, с помощью которого можно произвести необходимые расчеты и построения, используя только каталожные данные. Активное сопротивление обмотки статора r1 значительно меньше остальных сопротивлений цепи статора и ротора, и им обычно пренебрегают. Тогда выражения (10.51) — (10.53) будут иметь вид (10.54)
| M = | 3U1ф2r’2 | ; |
| ω0s [(r’2/s)2 + хк2] |
(10.55) sкр = ± r’2/хк; (10.56)
Упрощенное уравнение механической характеристики получается из совместного решения уравнений (10.54) — (10.56): (10.57)
| M = | 2M max | ; |
| s/sк + sк/s |
Значение Мmax определяется из отношения Мmax/Мном = λ, указываемого в каталогах, a sкр — из уравнения (10.57), если решить его относительно sкр и вместо текущих значений s и М подставить их номинальные значения, которые легко определить по паспортным данным: (10.58) sкр = sном (λ ± √λ2 — 1), где sном = (n0 — nном)/n0; λ = Мmax/Мном. Следует отметить, что в зоне от М = 0 до М ≈ 0,9Мmax механическая характеристика близка к прямой линии. Поэтому, например, при расчетах пусковых и регулировочных резисторов эту часть механической характеристики принимают за прямую линию, проходящую через точки М = 0, n = n0 и Мном , nном . Уравнение механической характеристики в этой части будет иметь вид
| M = | Мном | s. |
| sном |
Влияние напряжения питающей сети. Анализ уравнений (2.21) и (2.23) показывает, что изменение напряжения сети влияет на момент двигателя и не влияет на его критическое скольжение. При этом момент, развиваемый двигателем, изменяется пропорционально квадрату напряжения: М≡ kU2, (2.28) где k – коэффициент, зависящий от параметров двигателя и скольжения. Механические характеристики асинхронного двигателя при изменении напряжения сети представлены. В данном случае Uн= U1>U2>U3. Влияние добавочного внешнего активного сопротивления, включенного в цепь статора. Добавочные сопротивления вводят в цепь статора для уменьшения пусковых значений тока и момента. Падение напряжения на внешнем сопротивлении является в данном случае функцией тока двигателя. При пуске двигателя, когда величина тока большая, напряжение на обмотках статора снижается. При этом согласно уравнениям (2.21), (2.22) и (2.23) изменяются пусковой момент Мп, критический момент Мк и угловая скорость ωк. Механические характеристики при различных добавочных сопротивлениях в цепи статора представлены на рис.2.14б, где Rд2>R д1. Влияние добавочного внешнего сопротивления, включенного в цепь ротора. При включении добавочного сопротивления в цепь ротора двигателя с фазным ротором его критическое скольжение повышается, что объясняется выражением . Схема включения (а) и механические характеристики (б) асинхронного двигателя с фазным ротором при включении добавочного сопротивления в цепь ротора В выражение (2.23) величина R/2 не входит, так как эта величина не влияет на МК, поэтому критический момент остается неизменным при любом R/2. Механические характеристики асинхронного двигателя с фазным ротором при различных добавочных сопротивлениях в цепи ротора представлены. Влияние частоты тока питающей сети. Изменение частоты тока влияет на величину индуктивного сопротивления Xк асинхронного двигателя и, как видно из уравнений (2.18), (2.22), (2.23) и (2.24), оказывает влияние на синхронную угловую скорость w0, критическое скольжение Sк и критический момент Mк. Причем ; ; w0ºf, где C1, C2 — коэффициенты, определяемые параметрами двигателя, не зависящими от частоты тока f.
Способы подключения
Запуск электромотора должен происходить с минимальным скачком тока в обмотках. Для этого применяется 5 основных способов подключения:
- непосредственный — питание подается прямо на контакты электродвигателя через контактор или пускатель, когда падение напряжения не критично;
- снижение напряжения в течение времени старта;
- схема соединения обмоток статора переключается на треугольник со звезды;
- плавный запуск;
- изменение частоты напряжения сети.
Для однофазных версий используют расщепление полюсов, конденсаторный или резисторный пуск. Трехфазные электродвигатели запускаются или напрямую, переключением на треугольник, или посредством преобразователя напряжения, будь то реостат, трансформатор. Применяют изменение числа пар полюсов.
Как обеспечивается регулировка скорости
Регулировать частоту вращения асинхронного двигателя не так просто. Существуют 3 возможности. Можно изменить:
- частоту питающей сети;
- число пар полюсов;
- величину скольжения.
Чтобы изменить число пар полюсов нужно специальным образом заложить обмотку статора. Дальнейшие действия заключаются в возможности переключаться на одну, две или три пары полюсов. Такое переключение будет ступенчатым. Соответственно, дискретно будет меняться и частота вращения ротора асинхронного двигателя. В многополюсных обмотках статора частота выше.
Второй способ — изменить скольжение. Его величина зависит, в том числе, и от сопротивления. Для этого ротор оснащают обмотками и делают выводы через кольца. Появляется скользящий контакт, надежность уменьшается. Но помощью реостата или ступенчатого переключения можно вводить дополнительное сопротивление в ротор и плавно, либо дискретно, изменять величину скольжения. Посредством этого действия появляется возможность регулировать частоту вращения асинхронных двигателей.
Однако эти способы не очень экономичны или неудобны. С развитием силовой электроники появился третий, самый действенный способ — изменять частоту питающей сети, для чего служат частотные преобразователи. При плавном изменении частоты питающего тока можно получить непрерывный ряд частот магнитного поля статора асинхронного двигателя в определенном диапазоне, а значит так же плавно изменять скорость вращения вала. Силовая электроника дала АД новый толчок в развитии, их доля превышает 80% всех электродвигателей в мире.
Анализ характеристики cosφ от нагрузки
Характеристика cosφ показывает изменение коэффициента мощности в зависимости от нагрузки. В режиме холостого хода cosφ минимален (0,1-0,2), так как присутствует лишь реактивный ток намагничивания I0. С ростом нагрузки доля активной составляющей тока растет и cosφ увеличивается. Максимальные значения 0,8-0,9 коэффициент мощности принимает при нагрузках 0,75-1,0 от номинальной (Рис. 3).
При снижении нагрузки ниже 0,5 номинальной cosφ резко падает. Это приводит к увеличению реактивной мощности, потребляемой из сети, и снижению энергоэффективности. Поэтому не рекомендуется эксплуатировать асинхронные двигатели на холостом ходу и при сильных недогрузках.

Анализ КПД асинхронного двигателя
КПД асинхронного двигателя сильно зависит от нагрузки. В режиме холостого хода КПД стремится к нулю, так как отсутствуют потери в роторе на нагрев. С ростом нагрузки КПД растет, достигая максимума 0,9-0,95 при нагрузках 0,75-1,0 номинальной (Рис. 4). Это обусловлено тем, что при данных нагрузках потери на нагрев обмоток приблизительно равны постоянным потерям в стали сердечника. Дальнейшее увеличение нагрузки приводит к росту потерь в роторе и снижению КПД.
Таким образом, для достижения максимального КПД необходимо обеспечивать нагрузку асинхронного двигателя на уровне 0,75-1,0 номинальной. Это нужно учитывать при выборе двигателя и организации техпроцесса.
В статье рассмотрены основные рабочие характеристики асинхронных двигателей и методы их анализа. Полученные знания помогут оптимизировать режимы работы асинхронных двигателей и повысить эффективность их применения на практике.
Электромеханическая характеристика
Она являет собой зависимость угловой скорости вращения от тока статора. Используя несколько опорных точек можно построить электромеханическую характеристику. Номинальный ток рассчитывается по формуле:

Ток холостого хода составляет 30—40% от номинального.
Формула расчета при критическом скольжении:

Ток в начальный момент пуска:

Все значения отражают электромеханическую характеристику.
Рабочие характеристики
Рабочие характеристики асинхронного электродвигателя — это взаимосвязь нескольких параметров от полезной мощности P2. В их число входят: частота вращения самого ротора n2, момент на валу М, скольжение S, ток статора I1, расходуемая мощность P, коэффициент мощности СОSφ и КПД.
Причем частота электрического тока и напряжение неизменны, в отличие от нагрузки.
Как правило, рабочие характеристики асинхронного двигателя строятся в диапазоне значений скольжения от 0 до значения, превышающего номинальное на 10%. Это зона, где машина работает устойчиво.
Частота вращения ротора n2 уменьшается при возрастании нагрузки на валу. Но эти изменения не превышают 5%. Ток I1 растет, поскольку при последующем увеличении нагрузки его активная составляющая превышает реактивную.
СОSφ при холостом ходе мал. Но затем он возрастает. При повышенных нагрузках СОSφ уменьшается из-за возрастающего внутри обмотки ротора реактивного сопротивления.
КПД холостого хода равен 0. С увеличением нагрузки наблюдается его резкий рост, а впоследствии, снижение.



