С 1950-х годов токовая петля используется для передачи данных от измерительных преобразователей в процессе мониторинга и контроля. При низкой стоимости реализации, высокой помехоустойчивости и возможности передачи сигналов на большие расстояния, токовая петля оказалась особенно удобной для работы в промышленных условиях. Этот материал посвящен описанию базовых принципов работы токовой петли, основам проектирования , настройке .
Использование тока для передачи данных от преобразователя
Датчики промышленного исполнения часто используют токовый сигнал для передачи данных в отличие , от большинства других преобразователей , таких ,например, как термопары или тензорезистивные датчики , которые используют напряжение сигнала. Несмотря на то , что преобразователи ,использующие напряжение в качестве параметра передачи информации ,действительно эффективно применяются во многих производственных задачах, существует круг приложений , где использование характеристик тока предпочтительнее. Существенным недостатком при использования напряжения для передачи сигналов в промышленных условиях является ослабление сигнала при его передаче на значительные расстояния вследствие наличия сопротивления проводных линий связи. Можно,конечно, использовать высокий входной импеданс устройств, чтобы обойти потери сигнала. Однако, такие устройства будут весьма чувствительны к шуму, которые индуцируют находящиеся поблизости моторы, приводные ремни или радиовещательные передатчики.
Согласно первому закону Кирхгофа сумма токов, втекающих в узел ,равна сумме токов, вытекающих из узла.
В теории, ток ,протекающий в начале контура ,должен достичь его конца в полном объеме,
как показано на рис.1. 1.
Рис.1. В соответствии с первым законом Кирхгофа ток в начале контура равен току в его конце.
Это основной принцип, на котором работает контур измерения.. Измерение тока в любом месте токовой петли (измерительного контура) дает один и тот же результат. Используя токовые сигналы и приемные устройства для сбора данных с низким входным сопротивлением , в промышленных приложениях возможно получить значительный выигрыш от улучшения помехоустойчивости и увеличения длины линии связи.
Компоненты токовой петли
В состав основных компонентов токовой петли входят источник постоянного тока , первичный преобразователь, устройство сбора данных , и провода, соединяющие их в ряд, как показано на рисунке 2.
Рис.2. Функциональная схема токовой петли.
Источник постоянного тока обеспечивает питание системы. Преобразователь регулирует ток в проводах в диапазоне от 4 до 20 мА, где 4 мА представляет собой «живой» ноль , а 20 мА представляет максимальный сигнал.
0 mA (отсутствие тока ) означает разрыв в цепи. Устройство сбора данных измеряет величину регулируемого тока. Эффективным и точным методом измерения тока является установка прецизионного резистора- шунта на входе измерительного усилителя устройства сбора данных (на рис.2) для преобразования тока в напряжение измерения, чтобы в конечном итоге получить результат ,однозначно отражающий сигнал на выходе преобразователя.
Интерфейс «Токовая петля»
Чтобы помочь лучше понять принцип работы токовой петли , рассмотрим для примера конструкцию системы с преобразователем , имеющую следующие технические характеристики :
Преобразователь используется для измерения давления
Преобразователь расположен в 2000 футов от устройства измерения
Ток ,измеряемый устройством сбора данных, обеспечивает оператора информацией о величине давления, приложенного к преобразователю
Рассмотрение примера начнем с подбора подходящего преобразователя.
Проектирование токовой системы
Выбор преобразователя
Первым шаг в проектировании токовой системы является выбор преобразователя. Независимо от типа измеряемой величины (расход, давление, температура, и т.д.) важным фактором в выборе преобразователя является его рабочее напряжение. Только подключение источника питания к преобразователю позволяет регулировать величину тока в линии связи. Значение напряжения источника питания должно находиться в допустимых пределах : больше , чем минимально необходимое ,меньше , чем максимальное значение, которое может привести к повреждению преобразователя.
Для токовой системы, рассматриваемой в примере , выбранный преобразователь измеряет давление и имеет рабочее напряжение от 12 до 30 В. Когда преобразователь выбран, требуется правильно измерить токовый сигнал, чтобы обеспечить точное представление о давлении, подаваемом на датчик.
Выбор устройства сбора данных для измерения тока
Важным аспектом, на который следует обратить внимание при построении токовой системы, является предотвращение появления токового контура в цепи заземления. Общим приемом в таких случаях является изоляция. Использовав изоляцию, вы можете избежать влияния контура заземления , возникновение которого поясняет рис.3.
Рис.3. Контур заземления
Заземляющие контуры образуются при двух подключенных терминалов в цепи в разных местах потенциалов. Эта разница приводит к появлению дополнительного тока в линии связи, что может привести к появлению ошибок при измерениях.
Под изоляцией устройства сбора данных понимается электрическое отделение земли источника сигнала от земли входного усилителя измерительного устройства, как показано на рисунке 4.
Поскольку ток не может течь через барьер изоляции, точки заземления усилителя и источника сигнала имеют один и тот же потенциал. Таким образом исключается возможность непреднамеренно создать контур заземления.
Рис.4. Синфазное напряжение и напряжение сигнала в схеме с изоляцией
Изоляция также предотвращает от повреждения устройство сбора данных при наличии больших синфазных напряжений. Синфазным называют напряжение одинаковой полярности ,которое присутствует на обоих входах инструментального усилителя. Например, на рис.4. и положительный (+) ,и отрицательный (-) входы усилителя имеют +14 V синфазного напряжения. Многие устройства сбора данных имеют максимальный входной диапазон ±10 В. Если устройство сбора данных не имеет изоляции и синфазное напряжение выходит за максимальный входной диапазон, вы можете повредить устройство. Хотя нормальное (сигнальное ) напряжение на входе усилителя на рис.4 составляет только +2 В, добавка +14 в может дать в результате напряжение +16 В
(Сигнальное напряжение – это напряжение между « + » и « — » усилителя, рабочее напряжение есть сумма нормального и синфазного напряжения ),что представляет опасный уровень напряжения для устройств сбора с меньшим рабочим напряжением.
При изоляции общая точка усилителя электрически отделена от нуля заземления. В схеме на рисунке 4 потенциал в общей точке усилителя «приподнят» на уровень +14 V. Такой прием приводит к тому, величина входного напряжения падает с 16 до 2 В.Теперь сбора данных, устройства больше не на риск перенапряжения ущерб. (Обратите внимание, что изоляторы имеют максимальную синфазного напряжения они могут отвергнуть.)
После того как устройство сбора данных изолировано и защищено, последним шагом при комплектовании токовой петли является выбор соответствующего источника питания .
Выбор источника питания
Определить, какой источник питания наилучшим образом отвечает вашим требованиям, весьма просто. При работе в токовой петле , блок питания должен выдавать напряжение, равное или большее, чем сумма падений напряжений на всех элементах системы.
Устройство сбора данных в нашем примере использует прецизионной шунт для измерения тока.
Необходимо рассчитать падение напряжения на этом резисторе. Типовой шунтирующий резистор имеет сопротивление 249 Ω. Основные расчеты при диапазоне тока в токовой петле 4 .. 20 мА
показывают следующее:
I*R=U
0,004A*249Ω= 0,996 V
0,02A*249Ω= 4,98 V
С шунта сопротивлением 249 Ω мы можем снять напряжение в диапазоне от 1 до 5 В, увязав величину напряжения на входе устройства сбора данных с величиной выходного сигнала преобразователя давления.
Как уже упоминалось ,преобразователь давления требует минимального рабочего напряжения 12 В при максимальным 30 В. Добавив падение напряжения на прецизионном шунтирующем резисторе к рабочему напряжению преобразователя , получаем следующее:
12 В+ 5 В=17 В
На первый взгляд , хватит напряжения 17В.Необходимо ,однако, учесть дополнительную нагрузку на блок питания , которую создают провода , имеющее электрическое сопротивление.
В случаях , когда датчик находится далеко от измерительных приборов, вы должны учитывать фактор сопротивления проводов при расчетах токовой петли. Медные провода имеют сопротивление постоянному току, , которое прямо пропорционально их длине. С датчиком давления из рассматриваемого примера вам необходимо учесть 2000 футов длины линии связи при определении рабочего напряжения источника питания. Погонное сопротивление одножильного медного кабеля 2.62 Ω/100 футов . Учет этого сопротивления дает следующее :
Сопротивление одной жилы длиной 2000 футов составит 2000*2,62/100= 52,4 м.
Падение напряжения на одной жиле составит0,02* 52,4= 1,048 В.
Чтобы замкнуть цепь ,необходимы два провода ,тогда длина линии связи удваивается , и
полное падение напряжения составит 2,096 В. В итоге около 2.1 В благодаря тому ,что расстояние от преобразователя до вторичного прибора составляет 2000 футов. Просуммировав падения напряжения на всех элементах контура , получим :
2,096 В + 12 В+ 5 В=19,096 В
Если вы использовали 17 V для питания рассматриваемой схемы , то напряжение, подаваемое на преобразователь давления будет ниже минимального рабочего напряжения за счет падения на сопротивлении проводов и шунтирующем резисторе . Выбор типового источник питания 24 В удовлетворит требованиям по питанию для преобразователя. Дополнительно имеется запас напряжения для того, чтобы разместить датчик давления на большем расстоянии.
С выбором правильно подобранных преобразователя , устройства сбора данных, длины кабелей и источника питания разработка простой токовой петли завершена. Для более сложных приложений вы можете включить дополнительные каналы измерений в систему.
2.3. интнрфейс rs-485, rs-422 и rs-232
- 1 Архитектура системы
- 2 Промышленные сети и интерфейсы
- 2.1 Общие сведения о промышленных сетях
- 2.2 Модель OSI
- 2.3 Интерфейсы RS-485, RS-422 И RS-232
- 2.4 Интерфейс «токовая петля»
- 2.5 HART-протокол
- 2.6 CAN
- 2.7 PROFIBUS
- 2.8 MODBUS
- 2.9 Промышленный ETHERNET
- 2.10 Протокол DCON
- 2.11 Беспроводные локальные сети
- 2.12 Сетевое оборудование
- 2.13. Заключение

Располагается на площади 8900 м², оснащено самым современным технологическим оборудованием, имеет научно-исследовательское и конструкторское подразделение, использующие передовые средства автоматизации проектирования.
Телефон:
Режим работы:
Адрес:
Почта:
Оставьте свой номер и мы перезвоним Вам
Разработка и поддержка
cCube.ru
function setCookie(name, value, options = <>) < options = < path: ‘/’, // при необходимости добавьте другие значения по умолчанию . options >; if (options.expires instanceof Date) < options.expires = options.expires.toUTCString(); >let updatedCookie = encodeURIComponent(name) + «=» + encodeURIComponent(value); for (let optionKey in options) < updatedCookie += «; » + optionKey; let optionValue = options[optionKey]; if (optionValue !== true) < updatedCookie += » c3-cookie-button»>Продолжая использовать наш сайт, вы даете согласие на обработку файлов cookies и персональных данных в соответсвии с политикой. Окей, не возражаю
Интерфейсы токовой петли
Токовая петля – распространенный способ передачи сигналов во многих промышленных приложениях. Несмотря на то, что данный интерфейс применяется уже почти полвека, он не утратил свою актуальность, а решения для организации токовой петли присутствуют в линейке многих мировых производителей полупроводниковых компонентов. В предлагаемой статье рассматриваются решения для передачи данных с использованием токовой петли от компании Maxim Integrated Products – одного из лидеров в производстве аналоговых микросхем.


Токовая петля – способ передачи информации с помощью измеряемых значений силы электрического тока. Как правило, система с использованием токовой петли включает в себя датчик (давления, температуры, газов и т.п.), передатчик, приемник и аналого-цифровой преобразователь (АЦП) или микроконтроллер (рисунок 1).
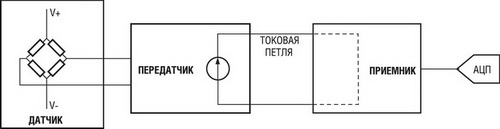
Рис. 1. Типовая схема применения токовой петли
На выходе датчика формируется напряжение, пропорциональное измеряемому параметру. Передатчик (усилитель тока, управляемый напряжением) преобразует напряжение от датчика в соответствующий ток от 4 до 20 мА. На другом конце линии приемник (усилитель напряжения, управляемый током) преобразует ток 4…20 мА обратно в напряжение. Аналого-цифровой преобразователь оцифровывает выходное напряжение приемника для последующей обработки процессором или микроконтроллером.
В системах с интерфейсом токовой петли информация передается с помощью модулированного сигналом тока. В токовой петле 4…20 мА, наименьшее значение сигнала соответствует току 4 мА, а наибольшее – 20 мА. Таким образом, весь диапазон допустимых значений составляет 16 мА. В петле постоянно поддерживается ток 4 мА, поэтому при более низкой величине тока обнаруживается обрыв линии и позволяет легко диагностировать такую ситуацию.
Как правило, в системах промышленной автоматики датчики удалены на большие расстояния от центрального управляющего узла, поэтому токовая петля до сих пор не утратила свою актуальность, поскольку является наиболее помехоустойчивым аналоговым интерфейсом, особенно – по сравнению с методами передачи данных напряжением. Более полноценная система, включающая в себя вторую токовую петлю (например, для управления приводом), продемонстрирована на рисунке 2.
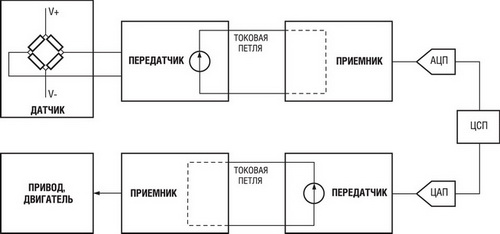
Рис. 2. Комплексная система с обратной связью для управления приводом
Опираясь на эту схему, рассмотрим решения, которые предлагает компания Maxim для ее реализации.
Операционный усилитель в качестве преобразователя напряжение-ток
На рисунке 3 представлена простая реализация преобразователя «напряжение-ток» с использованием операционного усилителя (ОУ) MAX9943. Данный ОУ при напряжении питания ±15 В обеспечивает выходной ток более ±20 мА, а также стабилен при емкостной нагрузке до 1 нФ, что делает его весьма подходящим для использования в длинной линии передачи. Для работы в диапазоне выходного тока 0…20 мА возможно однополярное питание усилителя, поскольку MAX9943 обеспечивает размах выходного напряжения, равный напряжению питания (rail-to-rail output).
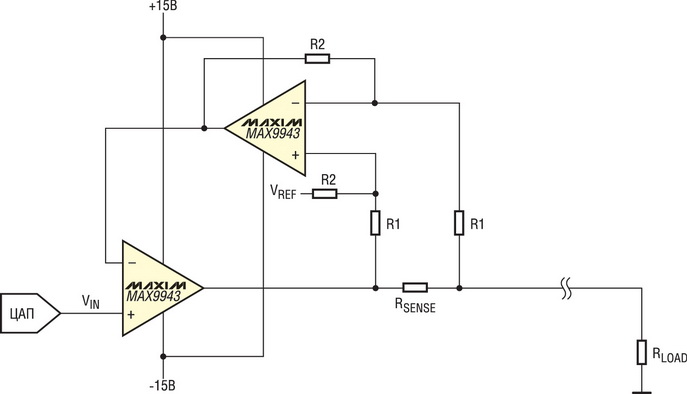
Рис. 3. Преобразователь напряжение-ток на MAX9943
В данной схеме зависимость между входным напряжением и током на нагрузке описывается выражением
Типовое значение нагрузочного сопротивления может составлять несколько кОм. В этом примере: R1 = 1 кОм; R2 = 10 кОм; RSENSE = 12.5 Ом; RLOAD = 600 Ом.
Для преобразования входного напряжения ±2.5 В в ток ±20 мА опорное напряжение VREF должно быть равно 0 В. Чтобы получить токовый выход 4…20 мА из входного напряжения 0…2.5 В, необходимо задать смещение для постоянного присутствия в линии тока 4 мА. При VREF = –0,25 В входное напряжение 0…2.5 В преобразуется в выходной ток 2…22 мА. Обычно разработчики выбирают немного расширенный динамический диапазон для возможности последующей программной калибровки. Зависимости входного напряжения и выходного тока показаны на рисунках 4 и 5.
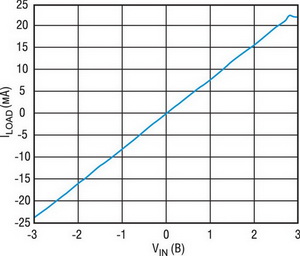
Рис. 4. Зависимость ILOAD от VIN для выхода ±20 мА
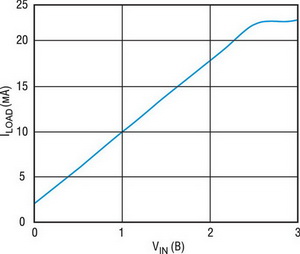
Рис. 5. Зависимость ILOAD от VIN для выхода 4-20мА
MAX15500 и MAX15501 – формирователи сигнала токовой петли
Схема на рисунке 3 с использованием операционных усилителей – это простая реализация токовой петли, которая вызывает сложности при калибровке, а также большую погрешность при передаче сигналов в реальных условиях эксплуатации. На практике, для реализации преобразователя «напряжение-ток» целесообразно использовать однокристальные решения, технические параметры которых жестко описаны в документации.
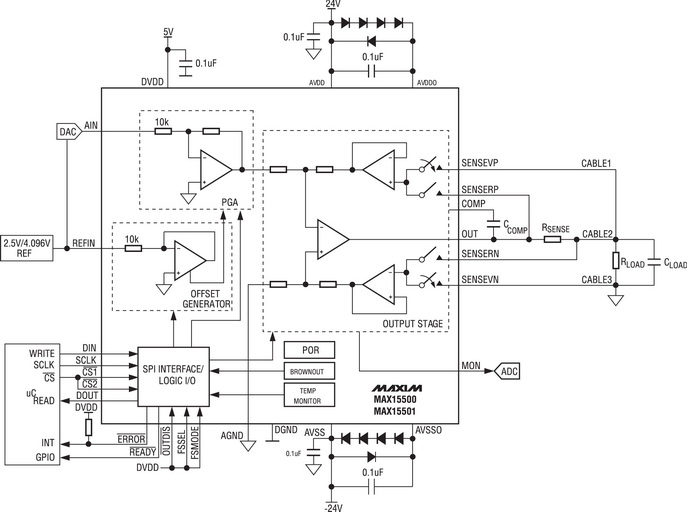
Рис. 6. Схема применения MAX15500/15501
Пример подобного решения – MAX15500/15501, программируемые по интерфейсу SPI формирователи аналогового токового выхода или выхода напряжения. Входное напряжение для этих преобразователей, как правило, берется с выхода внешнего ЦАП. Для MAX15500 диапазон входного напряжения 0…4.096 В, а для MAX15501 – 0…2.5 В. Программно доступны шесть режимов работы выходного каскада: ±10 В; 0…5 В; 0…10 В; ±20 мА; 0…20 мА; 4…20 мА. Микросхемы обеспечивают защиту от короткого замыкания; определение обрыва в линии передачи; защиту от перегрева и определение падения питающего напряжения ниже порогового.
MAX5661 – ЦАП с токовым выходом
Наиболее интегрированный вариант преобразователя с токовым выходом – MAX5661. Это одноканальный 16-битный ЦАП с прецизионным высоковольтным усилителем, который организует законченное решение для преобразования цифрового сигнала от процессора в программируемый токовый выход (0…20 мА или 4…20 мА) или в напряжение промышленного стандарта ±10 В.
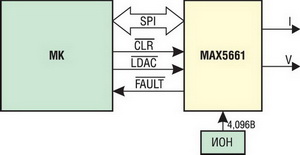
Рис. 7. Схема применения ЦАП MAX5661 с поддержкой токового выхода
Управление и передача данных в ЦАП осуществляется по четырехпроводному SPI-интерфейсу. В микросхеме предусмотрен выход #FAULT, с помощью которого можно диагностировать обрыв в токовой петле или короткое замыкание на выходе напряжения. Следует отметить, что MAX5661 требует использования внешнего источника опорного напряжения 4,096 В. В документации приводится список рекомендуемых ультрапрецизионных ИОН, например, MAX6341, MAX6133 или MAX6033. Для быстрого освоения всего функционала MAX5661 предлагается отладочный набор MAX5661EVCMAXQU+ с интерфейсом к ПК для управления ЦАП с помощью графического интерфейса (GUI).
MAX1452 – преобразователь сигнала датчика в токовую петлю
До сих пор мы рассматривали решения, подходящие для преобразования сигнала от микроконтроллера или ЦАП, т.е. для передачи управляющих сигналов. Для получения токового сигнала со стороны датчика Maxim предлагает микросхему MAX1452, сочетающую в себе аналоговую часть с ОУ для формирования информационного сигнала и цифровую схему, обеспечивающую компенсацию температурного дрейфа, подстройку сдвига нуля, а также программируемый с помощью PGA коэффициент передачи. Все коэффициенты подстройки хранятся во встроенной EEPROM-памяти объемом 768 байт.
На рисунке 8 представлена схема включения MAX1452 с токовым выходом 4…20 мА и питанием от токовой петли. Для формирования тока в петле используется транзистор 2N2222A.
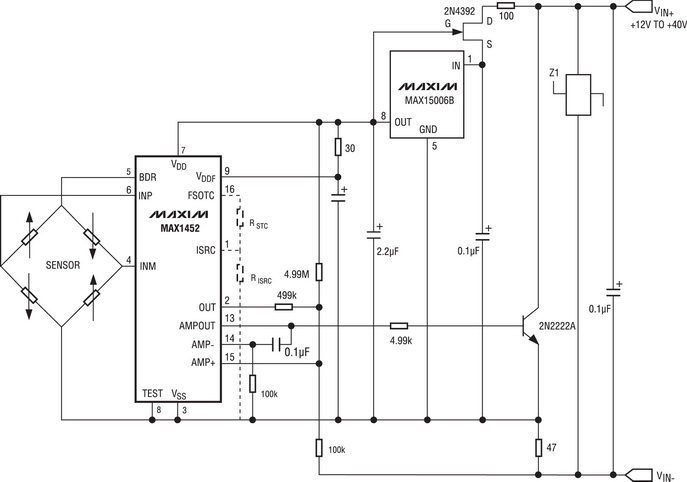
Рис. 8. Схема включения MAX1452 в качестве преобразователя с токовым выходом
HART-модем DS8500
HART (Highway Addressable Remote Transducer Protocol) – цифровой промышленный протокол передачи данных, позволяющий, как правило, осуществить настройку датчика или получить информацию о его состоянии с использованием линии, на которой организована аналоговая токовая петля. Для передачи цифровых данных используется FSK-модулированный сигнал (модуляция переключением частоты) поверх токовой петли 4…20 мА (рисунок 9). Такой способ реализации позволяет использовать протокол HART в уже существующих системах с аналоговой токовой петлей.
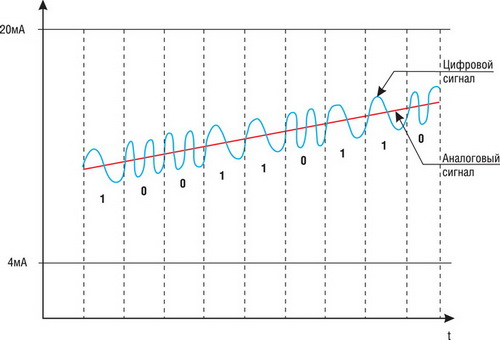
Рис. 9. FSK-модулированный сигнал поверх аналоговой токовой петли
Для организации физического уровня HART (модуляции и демодуляции) компания Maxim предлагает микросхему HART-модема DS8500, которая позволяет осуществлять полудуплексный режим приема-передачи, при этом «1» модулируется частотой 1.2 кГц, «0» – 2.2 кГц. Функционально DS8500 состоит из демодулятора, цифрового фильтра, АЦП, модулятора и ЦАП (рисунок 10).
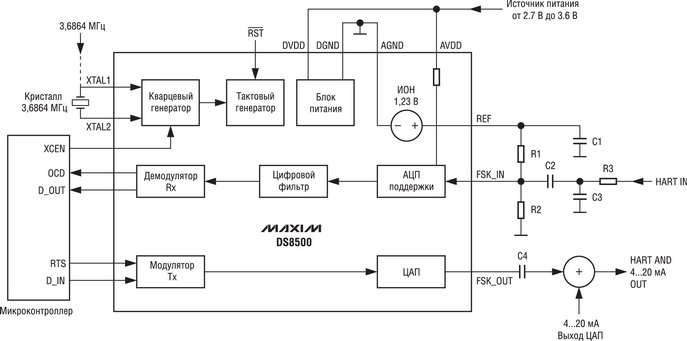
Рис. 10. Функциональная схема DS8500
Подобная архитектура (с наличием цифровой фильтрации и ЦАП, который генерирует чистый синусоидальный сигнал с непрерывным по фазе переключением между частотами) обеспечивает надежный прием сигнала в условиях помех.
Заключение
Компания Maxim предлагает полный спектр решений для организации передачи данных с использованием токовой петли как от датчиков до центрального управляющего блока, так и от этого блока до исполнительных узлов. Помимо этого, для расширения функционала подобной промышленной системы в линейке Maxim присутствуют более 300 различных микросхем интерфейсов RS-485/RS-232, CAN, LIN.
Литература
Урок 52. Интерфейс ИРПС (цифровая токовая петля). Принцип действия, параметры, схемная реализация.
В уроке расскажу о простом, но эффективном радиальном интерфейсе ИРПС. Больше внимания уделю не самому стандарту, а практической реализации цифровых интерфейсов по принципу “токовой петли”.
ИРПС расшифровывается как «интерфейс радиальный последовательный». Другое название –“токовая петля”. Интерфейс появился задолго до современных стандартов RS232, RS485 и широко использовался в телетайпах. Затем несколько изменились его параметры, и ИРПС нашел применение в компьютерных системах.
ИРПС позволяет простыми аппаратными средствами реализовать передачу данных на большие расстояния, до нескольких километров. Он обладает высокой помехоустойчивостью, и, что немаловажно, обеспечивает гальваническую развязку абонентов от линии связи.
Благодаря простоте реализации ИРПС идеально подходит для недорогих распределенных систем на базе Ардуино. Я расскажу о его различных схемных вариантах, позволяющих значительно увеличить длину линии связи, повысить помехоустойчивость, использовать для соединения устройств не витые пары, а простые провода. Используя принцип ”токовой петли” можно построить и сети магистральной топологии, с несколькими абонентами.
Когда-то на одной ГРЭС мне выделили для организации связи между устройствами два простых провода в высоковольтном кабеле. Высоковольтным назвал кабель я, работники ГРЭС называли его низковольтным. Максимальное напряжение в кабеле было 1000 В, дикий уровень помех, длина примерно 1000 м. В сеть было включено два компьютера и 8 регистраторов дискретных сигналов. Передачу данных я организовал по принципу “токовой петли”, и сеть прекрасно работала на скорости 19200 бод. Я не знаю, какой другой интерфейс можно было использовать в таких условиях.
Сейчас ИРПС несколько теряет свою актуальность в связи распространением беспроводных технологий. Но благодаря своей простоте и надежности его применение во многих случаю остается оправданным. Например, я использую ”токовую петлю” для подключения к станциям катодной защиты компьютера, терминала, телеметрии. В фасовочном оборудовании периферийные контроллеры обмениваются данными с центральным контроллером также по ”токовым петлям”. Привлекают все те же качества: простота, помехоустойчивость, гальваническая развязка.
Принцип действия “токовой петли”.
Основной принцип действия содержится в названии – “токовая петля”.
Передатчик и приемник связаны двух проводной линией связи. Образуется контур передачи (петля).

Передатчик это не источник напряжения, а источник тока. Информация передается значением тока в контуре.
Для источника тока, ток в последовательном контуре не зависит от сопротивления цепи. Поэтому ток на входе приемника будет иметь то же значение, как и на выходе передатчика независимо от:
- сопротивления линии связи (R линии);
- сопротивления приемника (R вх.);
- эдс индуктивной помехи (E инд.);
- напряжения питания;
- любого падения напряжения в контуре.
Это справедливо для чисто последовательного контура, без утечек тока. Это означает, что передатчик и приемник должны быть гальванически развязанными или приемник должен быть дифференциальным.
Емкостные наводки вызывают эдс, приложенные параллельно передатчику-источнику тока (E емк.). Токовая петля их не подавляет. Поэтому в качестве линии связи в ИРПС обычно используют витую пару.

ЭДС емкостных помех соседних скрученных участков кабеля вычитаются друг из друга, компенсирую емкостную помеху. Дополнительной защитной мерой может быть экранирование витой пары.
Еще одним свойством, повышающим помехозащищенность ИРПС, является низкое входное сопротивление приемника.
Также помехоустойчивость ИРП в значительной мере зависит от тока передатчика. Чем больше ток, тем труднее помехе или наводке повлиять на него. Когда-то для телетайпов использовали ток 60 мА. Затем этот параметр был снижен, и в настоящее время стандартными считаются значения 20 и 40 мА. Но ничего не мешает использовать для “токовой петли” другие значения токов в зависимости от конкретных требований.
“Токовую петлю” можно применять для передачи данных одновременно нескольким приемникам.
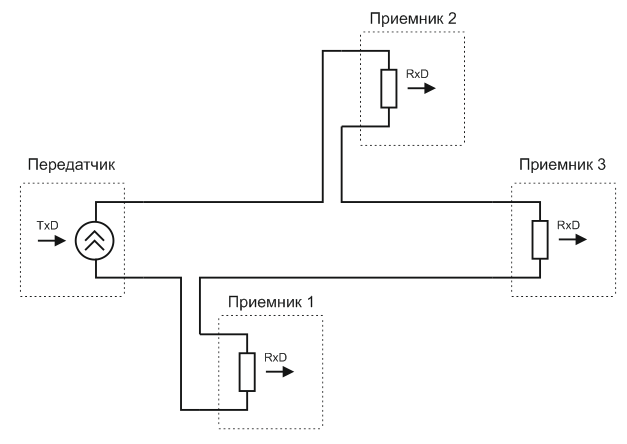
С помощью токовой петли могут передаваться как аналоговые, так и цифровые сигналы. В этой статье речь идет о передаче дискретных данных, т.е. о цифрой “токовой петле”.
Приемник цифровой ”токовой петли” срабатывает на определенные пороговые значения тока. В этом случае требования к точности и выходному сопротивлению передатчиков значительно ниже, чем при передаче аналоговых сигналов. Как следствие, проще аппаратная реализация.
Скорость передачи данных.
Использование в качестве передатчика источника тока приводит к основному недостатку ИРПС – невысокой скорости передачи данных. Это связано с зарядом емкости кабеля от источника тока при переключении сигнала.
При стабильном токе I через емкость C время заряда ее до напряжения U определяется формулой:
Допустим, у нас кабель длиной 1000 м и емкостью 75 нФ (75 пкФ/м). При токе 20 мА время заряда емкости кабеля до напряжения 5 В составит 18,75 мкс. Если принять время ”дрожания” асинхронного цифрового сигнала 25%, то длительность передачи бита будет 75 мкс, что соответствует скорости приблизительно 13 кбод.
Скорость передачи ИРПС определяется длиной линии связи. Стандарт заявляет скорость 9600 бод для линии длиной до 500 м. При увеличении длины кабеля скорость передачи пропорционально падает.
Стандартные параметры ИРПС.
Параметры интерфейса ИРПС описаны в стандарте ИРПС/IFFS (ОСТ 11305.916-84).
За рубежом интерфейс “Токовая петля” называется “Current Loop” . Специфицирован он в стандартах IEC 62056-21 / DIN 66258.
Основные параметры ИРПС я свел в таблицу.
| Параметр | Значение |
| Топология | Радиальный интерфейс |
| Линия связи | 4 провода (2 витые пары) |
| Режим обмена данными | Асинхронный, дуплексный |
| Гальваническая развязка | Со стороны приемника, напряжение 500 В |
| Способ передачи сигнала | Токовая петля. |
| Уровень логической 1 | Ток 15 … 25 мА (для ИРПС 20 мА) Ток 30 … 50 мА (для ИРПС 40 мА) |
| Уровень логического 0 | Ток 0 … 3 мА (для ИРПС 20 мА) Ток 5 … 10 мА (для ИРПС 40 мА) |
| Длительность фронта сигнала на выходе передатчика | Не более 1 мкс |
| Длительность фронта сигнала на входе приемника | Не более 50 мкс |
| Скорость передачи информации | 9600 бод, на расстояние до 500 м. При большем расстоянии скорость снижается пропорционально. |
| Режимы обрыва и замыкания линии связи | Долговременные. |
| Падение напряжения на входе приемника | Не более 5 В для телетайпа. Не более 2,5 В для других устройств. |
| Входная емкость приемника | Не более 10 нФ. |
Все эти требования могут и часто нарушаются в конкретных разработках. Могут быть другие токи, параметры передатчиков и приемников. Я, как правило, использую сигналы инверсных по отношению к стандарту уровней. Т.е. логической 1 соответствует отсутствие тока, а логическому 0 – наличие. В этом случае меньше потребляемый ток. Главное – это принцип “токовой петли”, который и обеспечивает свойства ИРПС.
Аппаратная реализация ИРПС.
Передатчик это источник тока. Источник тока — это источник напряжения с высоким выходным сопротивлением, в идеале с бесконечным сопротивлением.
Самый простой передатчик ИРПС это транзисторный ключ с последовательно включенным резистором.
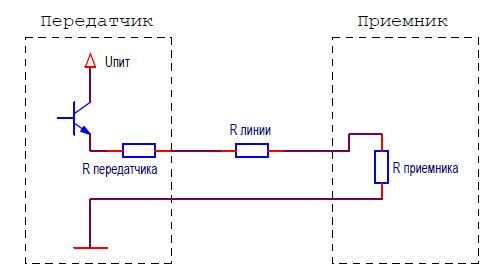
Ток в цепи определяется:
I = Uпит / ( Rпередатчика + Rлинии + Rприемника)
Если сопротивление линии намного меньше, чем сопротивление передатчика, то ток в контуре в малой мере зависит от параметров линии.
- Допустим сопротивление приемника равно 0. В любом случае мы его знаем, оно стабильно, и его можно учесть в расчетах.
- Если нам необходим ток 20 мА в цепи с нулевым сопротивлением линии, то сопротивление передатчика должно быть R = 12 В / 0,02 А = 600 Ом.
- Сопротивление двойного кабеля длиной 1000 м и сечением 0,35 мм 2 составляет 100 Ом. Если мы его подключим к цепи, то ток будет I = 12 В / ( 600 + 100 ) = 0,017 мА.
В итоге. При изменении сопротивления линии от 0 до 100 Ом ток в контуре будет меняться от 20 до 17 мА. Вполне допустимые значения для цифровой “токовой петли”.
Сопротивление резистора передатчика зависит от напряжения питания ключа. Для обеспечения того же тока в линии при увеличении напряжения питания сопротивление резистора необходимо увеличивать. Поэтому чем больше напряжение питания, тем большим может быть сопротивление линии связи.
В качестве приемника обычно используется оптрон. Он сам по себе является токовым приемником и обеспечивает гальваническую развязку.
Источник тока может быть расположен как на приемной, так и на передающей стороне. Узел с источником тока называется активным.
Лучше я объясню все это на практических схемах. Их может быть много. Я приведу основные варианты, наиболее распространенные.
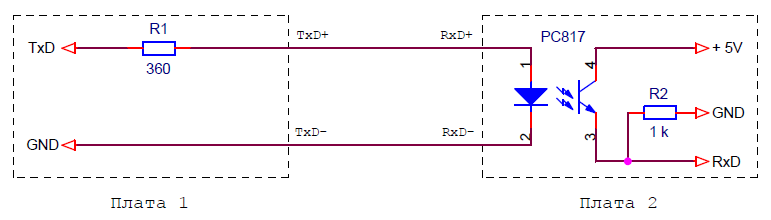
Самая простая схема соединения двух плат Ардуино с помощью ”токовой петли”.
Проще, наверное, не придумать. Передатчиком — источником тока является дискретный выход микроконтроллера с последовательно включенным резистором.

Расчет тока в цепи простой.
I = ( Uпередатчика – Uвх. приемника ) / ( R1 + Rлинии )
Относительно схемы выше при сопротивлении линии равном 0:
I = ( 5 В – 1,3 В ) / 360 Ом = 10,2 мА
Основные недостатки схемы:
- Низкое напряжение на выходе микроконтроллера, а значит небольшое сопротивление последовательного резистора.
- Как следствие, сопротивление линии должно быть достаточно низким, линия не может быть слишком длинной.
- Схема не может обеспечить ток более 10-15 мА из-за невысокой нагрузочной способности выводов микроконтроллера.
Тем не менее, схема вполне рабочая для связи устройств на расстоянии до нескольких десятков и даже сотен метров.
Можете соединить платы Ардуино по этой схеме. Программа из урока 49 будет работать без изменений. Только теперь максимальное расстояние между платами значительно увеличится.
В последней схеме логической 1 на выходе микроконтроллера соответствует отсутствие тока в линии, а при логическом 0 в контуре течет ток 10 мА. Если необходима обратная полярность, то схема будет выглядеть так.
Более совершенные схемы ИРПС.
В предыдущих 2 схемах активными являются передатчики. Гальваническая развязка происходит в приемниках. Устройства гальванически развязаны как бы параллельно линии связи, что не очень хорошо с точки зрения безопасности.
- Любое повреждение кабеля связи может привести к нарушению гальванической развязки.
- Да и главное требование безопасности – это гальваническая развязка устройства от потенциально опасного кабеля связи между устройствами. Кабель, как правило, физически расположен в местах где можно ожидать чего угодно, в том числе и замыкания на опасное для жизни напряжение.
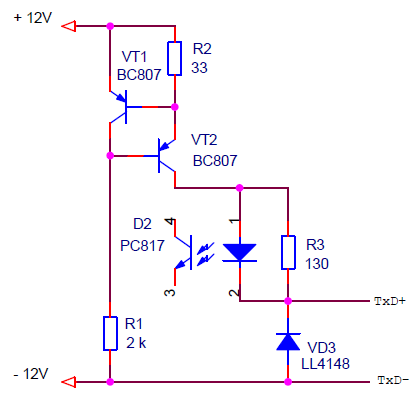
Следующая схема намного совершеннее во всех отношениях.
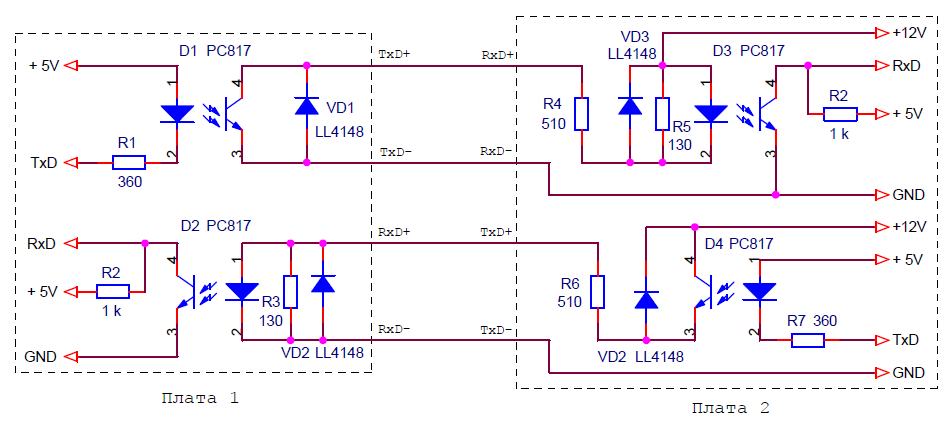
В ней обеспечиваются гораздо лучшие параметры передатчика, приемника и полная гальваническая развязка от линии связи одного устройства. На рисунке левого устройства.
В передатчике используется выходной ключ оптрона. В правом на схеме устройстве и приемник и передатчик являются активными, а в левом – пассивными. Получается, что левое устройство гальванически развязано от линии связи без применения дополнительного источника питания.
Ток в цепи упрощенно можно рассчитать по формуле:
I = ( Uпит – Uвх. Приемника ) / ( R6 + Rлинии )
I = ( 12 – 1,5 ) / 510 = 20,6 мА.
Диоды VD1-VD4 защищают приемники и передатчики от выбросов и наводок в линии отрицательной полярности. Лучше еще добавить пробивные стабилитроны (супрессоры) для ограничения сигналов по амплитуде, но это другая тема. Но как минимум, диоды на длинных линиях должны быть.
Если для правого устройства использовать гальванически развязанный от микроконтроллера источник питания, то развязаны от линии связи будут оба устройства.
В качестве передатчиков и приемников в схеме используются оптроны. Это приводит к двум проблемам.
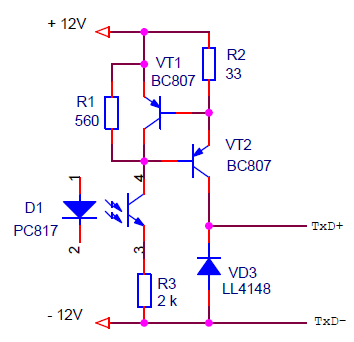
Выходной ток оптрона связан с входным коэффициентом передачи. Для различных типов оптронов он имеет разные значения. Но часто разработчики оптронов нормируют его в широких пределах. Например, для CNY74-3H коэффициент передачи составляет от 50 до 600 %.
При минимальном коэффициенте передачи 50 %, для того чтобы обеспечить выходной ток 20 мА, входной ток должен быть 40 мА. Это недопустимое значение, как для выхода микроконтроллера, так и для светодиода оптрона.
Выходной ток оптрона можно увеличить по этой схеме:
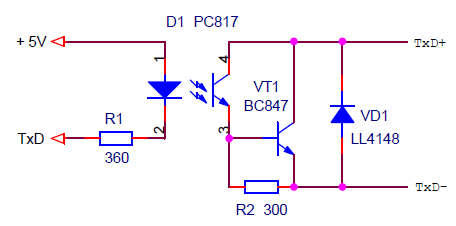
Дополнительный транзистор вместе с выходным транзистором оптрона образуют составной транзистор.
Вторая проблема со стороны приемника. Это ток срабатывания оптрона, а значит и приемника. Этот параметр опять же зависит от коэффициента передачи оптрона и может меняться в значительных пределах.
Необходимо задать порог тока, ниже которого приемник срабатывать не будет. Это можно сделать, включив дополнительный резистор параллельно светодиоду оптрона.
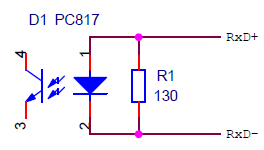
Часть тока будет течь через резистор R1. Ток через светодиод оптрона определяется формулой:
Iсветодиода = Iлинии – ( Uпр. светодиода / R 1).
Резистор “заберет” ток Uпр. светодиода / R1. Это и будет порог, к которому надо еще прибавить ток срабатывания оптрона. В это схеме порог равен 1,3 В / 130 Ом = 10 мА.
Использование в ИРПС стабилизатора тока.
Во всех предыдущих схемах стабилизатор тока активной стороны ИРПС реализовывался за счет резистора, включенного последовательно с источником напряжения. При этом ток в контуре зависел, в том числе и от сопротивления линии связи.
I = ( Uпередатчика – Uвх. приемника ) / ( Rпосл. + Rлинии )
Поэтому на сопротивление линии связи накладывалось ограничение. Как правило, оно не должно превышать 10-20 % от Rпосл.
Полностью устранить влияние сопротивления линии связи можно за счет применения стабилизатора тока. Например, по этой схеме.
Ток определяется по формуле:
и для этой схемы составляет 20 мА.
Здесь активным является передатчик. Но ничего не мешает использовать стабилизатор тока на приемной стороне.
Такие схемы позволяют осуществлять передачу данных на большие расстояния. Они в широких пределах компенсируют сопротивление линии связи.
Например, в последних двух схемах:
- задан ток 20 мА;
- напряжение питания 12 В;
- минимальное падение напряжение в передатчике 1,4 В;
- падение напряжения на входе приемника 1,5 В;
- максимально допустимое сопротивление линии связи
Rmax линии = (12 В – 1,4 В – 1,5 В ) / 0,02 А = 455 Ом. - Сопротивление двойного кабеля длиной 1000 м и сечением 0,35 мм 2 составляет
R = ρ * L / S = 0,0175 Ом мм 2 / м * 2000 м / 0,35 мм 2 = 100 Ом.
Т.е. две приведенные выше схемы допускаю длину кабеля связи сечением 0,35 мм 2 до 4,5 км.
Если увеличить напряжение питания, то этот параметр станет еще больше. Кстати, в схемах со стабилизатором тока питание может быть не стабилизированным. Источник тока скомпенсирует и эту нестабильность.
Другие конфигурации интерфейсов по принципу токовой петли.
Использую принцип токовой петли можно создать интерфейсы более сложных конфигураций. Например, в системе управления фасовочным оборудованием периферийные контроллеры связываются с центральным по двухпроводной линии связи. Используется принцип токовой петли, но реализована двунаправленная связь.
Со стороны центрального контроллера схема представляет собой резистор, подключенный к выходу микроконтроллера.
У периферийного контроллера схема сложнее.

В ней: приемный оптрон, передающий оптрон и оптрон, разрывающий цепь приемника во время передачи. В момент приема второй оптрон замыкает цепь приемного оптрона. А при передаче разрывает ее, позволяя нижнему оптрону передавать данные. Периферийный контроллер гальванически развязан от линии связи.
Урок получился с редким обилием схем. Основные радиальные интерфейсы я описал. Следующий урок будет посвящен протоколу ModBus.
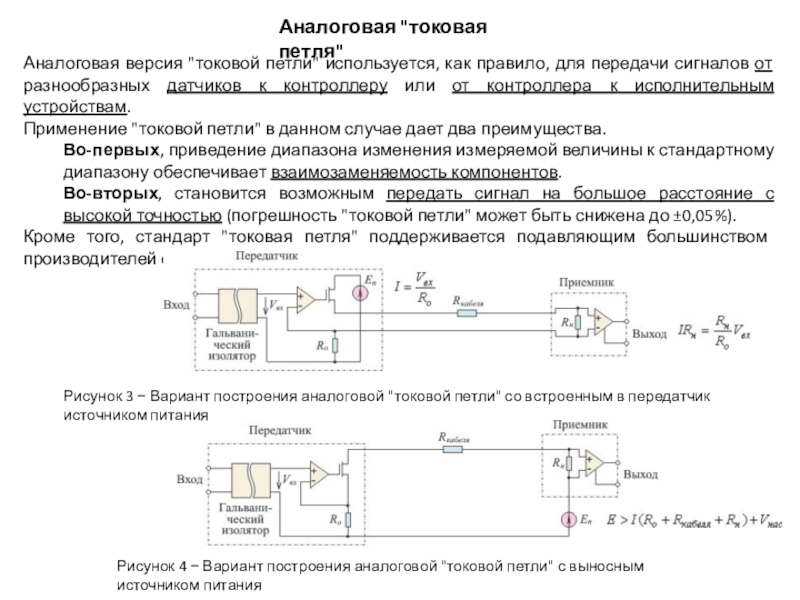
Слайд 5Аналоговая версия «токовой петли» используется, как правило, для передачи сигналов
от разнообразных датчиков к контроллеру или от контроллера к исполнительным
устройствам.
Применение «токовой петли» в данном случае дает два преимущества.
Во-первых, приведение диапазона изменения измеряемой величины к стандартному диапазону обеспечивает взаимозаменяемость компонентов.
Во-вторых, становится возможным передать сигнал на большое расстояние с высокой точностью (погрешность «токовой петли» может быть снижена до ±0,05%).
Кроме того, стандарт «токовая петля» поддерживается подавляющим большинством производителей средств промышленной автоматизации.
Аналоговая «токовая петля»
Рисунок 4 Вариант построения аналоговой «токовой петли» с выносным источником питания
Рисунок 3 Вариант построения аналоговой «токовой петли» со встроенным в передатчик источником питания
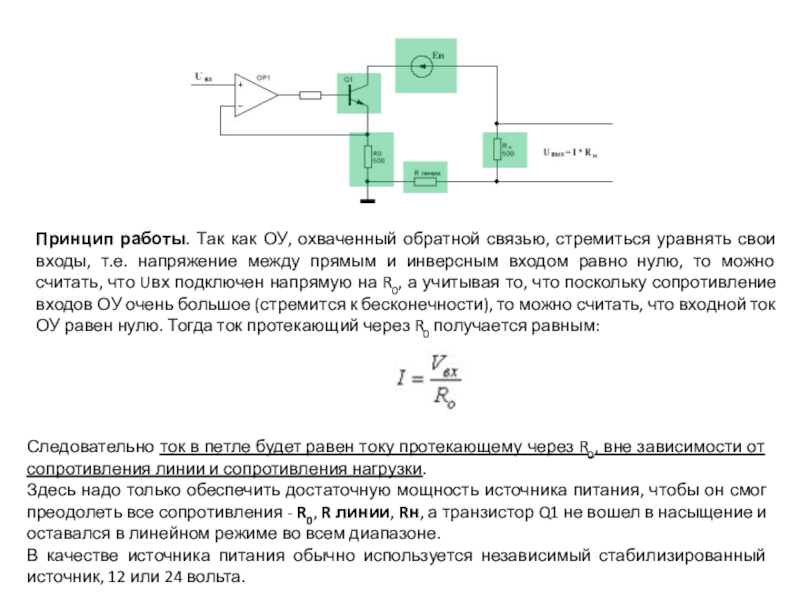
Слайд 6Принцип работы. Так как ОУ, охваченный обратной связью, стремиться уравнять
свои входы, т.е. напряжение между прямым и инверсным входом равно
нулю, то можно считать, что Uвх подключен напрямую на R0, а учитывая то, что поскольку сопротивление входов ОУ очень большое (стремится к бесконечности), то можно считать, что входной ток ОУ равен нулю. Тогда ток протекающий через R0 получается равным:
Следовательно ток в петле будет равен току протекающему через R0, вне зависимости от сопротивления линии и сопротивления нагрузки.
Здесь надо только обеспечить достаточную мощность источника питания, чтобы он смог преодолеть все сопротивления — R0, R линии, Rн, а транзистор Q1 не вошел в насыщение и оставался в линейном режиме во всем диапазоне.
В качестве источника питания обычно используется независимый стабилизированный источник, 12 или 24 вольта.
История
Задолго до RS- 232, токовые петли использовались для отправки цифровых данных в последовательной форме для телепринтеров. К одной цепи можно было подключить более двух телепринтеров, что позволило создать простую форму организации сети. В более старых телепринтерах использовалась токовая петля 60 мА. Более поздние машины, такие как Teletype Model 33, работали на более низком уровне тока 20 мА, а самые ранние миникомпьютеры имели интерфейс токовой петли 20 мА с общедоступным портом RS-232. как более дорогой вариант. В исходной карте IBM PC последовательный порт была предусмотрена токовая петля 20 мА.
Цифровая токовая петля использует отсутствие ток для высокого (пробел или обрыв) и наличие тока в контуре для низкого (отметка). Это делается для того, чтобы в нормальных условиях всегда был ток, и в случае обрыва линии поток останавливается на неопределенное время, немедленно вызывая тревогу о событии, как правило, из-за сильного шума телетайпа, который не синхронизируется, что может были бы невозможны, если бы в состоянии ожидания не протекал ток.
Электрические характеристики
Максимальное сопротивление токовой петли ограничено доступным напряжением. В интерфейсах с токовой петлей обычно используются напряжения, намного превышающие напряжение интерфейса RS-232, и они не могут быть соединены с входами напряжения без какой-либо схемы преобразователя уровня.
Для полнофункциональных дуплексная связь между двумя устройствами, будет использоваться две пары проводов. Общего стандарта для интерфейсов токовой петли не существует, поэтому такие детали, как синхронизация, разъемы, цветовые коды проводов и т. Д., Зависят от конкретного приложения.
Аналоговый вход (AI)
На входе приёмной части установлен преобразователь входного тока в напряжение, например, искробезопасный барьер. Обычно это просто резистор определенного сопротивления. В большинстве случаев его номинал равен 250 Ом. При токе в 4 мА на нём падает напряжение в 1 вольт, а при токе в 20 мА – 5 вольт, что довольно удобно для дальнейших преобразований.
Если выбрать в качестве входных резисторы 125 или 500 Ом, можно получить уровни напряжения 0,5…2,5 или 2…10 вольт. Измеряется входное напряжение обычно с помощью операционного усилителя – резистор подключается между инвертирующим и неинвертирующим входами, а дальше разность напряжений можно масштабировать так, как необходимо и преобразовать в цифровой вид.

Схема аналогового входа токовой петли
Если приёмником служит периферийное устройство (актуатор), то, в зависимости от входного тока, изменяется положение задвижки, частота вращения электродвигателя, степень открытия пневматических клапанов и происходят другие действия с исполнительными механизмами. Если же приёмником служит центральное устройство, например, контроллер, он обрабатывает сигнал датчика (о положении заслонки, о температуре или давлении, о скорости вращения вала и т.п) и предпринимает действия, заложенные в алгоритме.
Аналоговый выход (AO)
В настоящее время передающая часть токовой петли строится на интегральных преобразователях, выполняемых в виде одной микросхемы. Таков, например, преобразователь MAX12900. Эта микросхема разработана для работы под управлением микроконтроллера путем использования широтно-импульсной модуляции. ШИМ-сигнал с контроллера обрабатывается микросхемой и преобразуется в напряжение. Для конвертации напряжения в ток необходимы внешние транзисторы. Такое решение применяется на стороне передатчика, если им служит центральное устройство (компьютер).

Если передатчиком служит датчик (температуры, оборотов двигателя, давления, расхода, уровня и т.д.), то такое решение часто является излишним. В этом случае бывает рациональнее построить передающую часть на дискретных элементах. Сигнал с датчика преобразовывается в напряжение, которое затем конвертируется в ток с помощью операционного усилителя.

С появлением в 80-х годах прошлого столетия интерфейса RS-485 и общей тенденцией перехода на цифровые линии связи, популярность токовой петли стала падать. Тем не менее, она не сошла со сцены, применяется в новых разработках, под неё выпускаются электронные компоненты и готовые устройства. В современных системах автоматизации на промышленных объектах сигнал 4…20 мА применяется достаточно широко для приёма данных от датчиков и управления исполнительными механизмами или задания частоты вращения для частотного привода.
Похожие статьи:
Обзор современных протоколов промышленной автоматизации — Modbus, Profinet, EtherCAT и др.
Чем отличаются аналоговый сигнал от цифрового — примеры использования
Что такое петля фаза-ноль простым языком — методика проведения измерения
Что такое оптрон, как работает, основные характеристики и где применяется
Какие провода бывают — все разновидности кабелей и проводов
Преобразователи напряжения с 12 на 220 вольт



