По своей конструкции и схемам соединения обмотки фазных роторов машин переменного тока. В роторах машин мощностью до 80. 100 кВт обычно применяют катушечные обмотки. Конструктивно катушечные обмотки фазных роторов отличаются от статорных только расположением лобовых частей и наличием на них бандажей. В схемах отличие состоит в выборе начал фаз обмотки. Если расстояние между началами фаз обмотки статора выбирается минимально возможным для обеспечения большей компактности расположения выводных концов, то в обмотке ротора их стремятся расположить равномерно по окружности, чтобы облегчить балансировку обмотанного ротора.
С увеличением размеров машины уменьшается число витков в обмотке статора. Соответственно должно уменьшиться и число витков обмотки ротора, так как иначе напряжение на контактных кольцах возрастает, что может послужить причиной пробоя изоляции во время пуска машины. Поэтому в машинах больших габаритов обмотку ротора выполняют стержневой, имеющей всегда два эффективных проводника в пазу. Число витков в обмотке ротора при этом уменьшается, а ток ротора возрастает. Поэтому обмотку выполняют из прямоугольной меди или медных шин с площадью поперечного сечения, много большей, чем сечение проводников обмотки статора.
Стержневую обмотку ротора, как правило, делают волновой, так как в волновой обмотке меньше межгрупповых соединений, которые технологически трудновыполнимы при большом сечении проводников.

Основные закономерности соединений схем волновых обмоток фазных роторов рассмотрим на следующем примере. Составим схему стержневой волновой обмотки ротора, имеющего число пазов Z2= 24 и число полюсов 2р2 = 4. На рис. 3.40, а показаны 24 линии пазов, в которых расположены проводники верхнего слоя обмотки. Разметим эти пазы по фазам, предварительно определив полюсное деление τ2 = Z2 / 2p2 = 24/ 4 = 6 пазовым делениям и число пазов на полюс и фазу q2 = Z2/ (2p2m2) = 24/ (43) = 2.Стрелками на линиях укажем для первой фазы направления мгновенных значений токов в стержнях (одинаковые
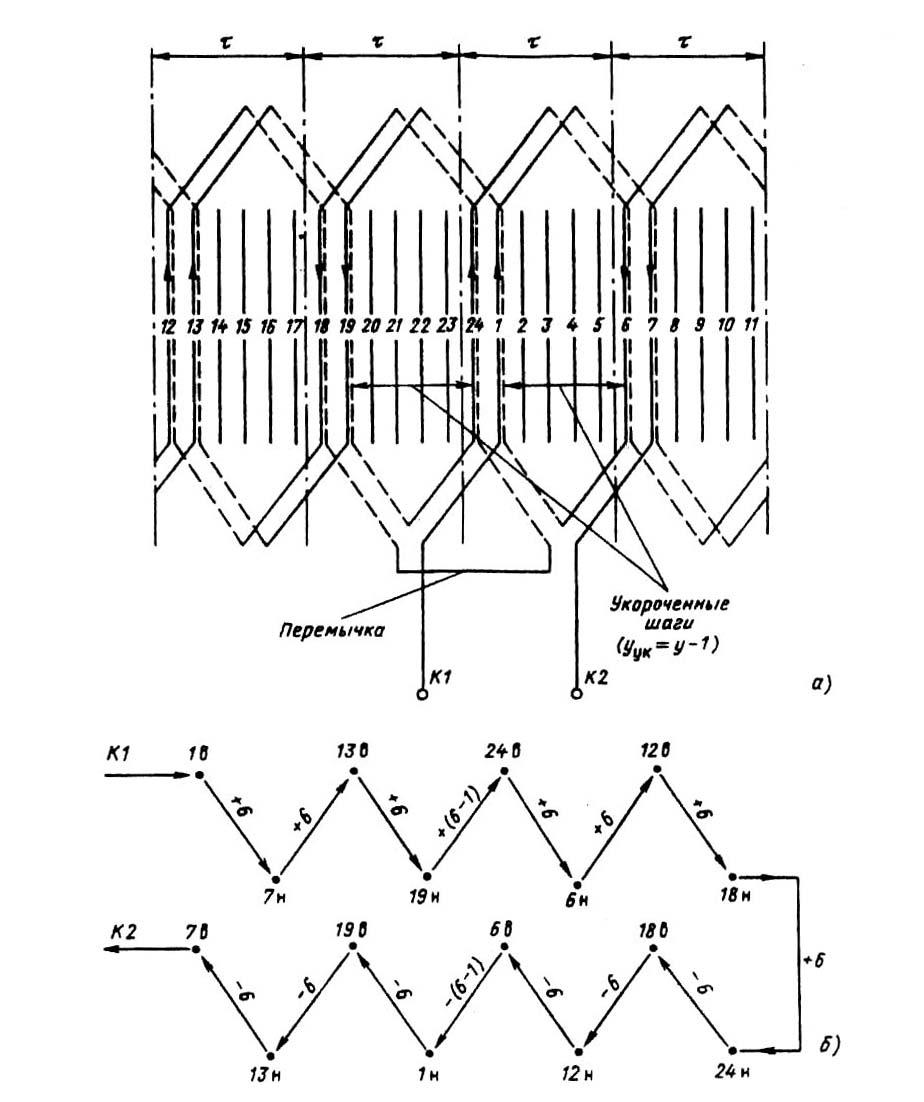
Рис. 3.40. К построению схемы стержневой волновой обмотки фазного ротора
асинхронного двигателя, Z = 24, 2р = 4:
а – схема соединений одной фазы; б – последовательность соединения стержней
в пределах каждого полюсного деления и изменяющиеся на обратные при переходе на соседние полюсные деления) и начнем построение схемы обмотки, приняв за начало первой фазы (К1) верхний стержень, лежащий в первом пазу.
Обмотку выполняют с диаметральным шагом. В данной схеме шаг обмотки по пазам у = τ2 = 6 зубцовых делений. Обмотка двухслойная, поэтому верхний стержень из паза 1 должен быть соединен с нижним стержнем паза 1 + у = 1 + 6 = 7. Далее нижний стержень паза 7 соединяется с верхним стержнем паза 7 + у = 7 + 6= 13 и т. д. Одновременно с вычерчиванием схемы целесообразно записывать последовательность шагов обмотки (рис. 3.40, б).
#001.»Звезда» или «Треугольник»?
Проделав таким образом 2р2 — 1 = 4 — 1 = 3 шага, убеждаемся, что при следующем — четвертом (по числу полюсов) шаге обмотка замкнется сама на себя, так как 2р2τ2 = Z2. При построении схемы этот шаг укорачивают или удлиняют на одно зубцовое деление, т. е. делают его равным у — 1 или у + 1. Чаще встречаются схемы с укороченными переходными шагами, так как они приводят к некоторой экономии меди обмотки. При удлиненном шаге возникают дополнительные перекрещивания лобовых частей верхнего и нижнего слоев у выхода стержней из паза.
Укороченным (или удлиненным) шагом завершается первый обход обмотки по окружности ротора. После q2 таких обходов (в рассматриваемом примере — после двух обходов) изменение последнего шага производить нельзя, так как это приведет обмотку данной фазы к стрежням соседней. Для соединения оставшихся после первых q2 обходов стержней фазы последний стержень, на котором занимающим такое же положение в пазу на расстоянии шага от него в направлении обхода, т. е. нижний стержень паза 18 соединяют с нижним стержнем паза 18 + 6 = 24. Далее продолжают обход в том же порядке, но изменив его направление. Построение обмотки заканчивается после q2 обходов в обратном направлении.
Начала других фаз обмотки располагают симметрично через 2р2q2 пазовых делений, т. е. через 1/3 окружности ротора (см. § 3.5).
Полная схема обмотки, построение которой начато в примере на рис. 3.40, приведена на рис. 3.41. За начала фаз приняты верхние стержни, расположенные в пазах 1, 9 и 17. Рассмотренная обмотка является типичной для стержневых волновых обмоток фазных роторов асинхронных двигателей.
Отметим некоторые особенности обмоток данного типа. В стержневой волновой обмотке имеется только по одной перемычке на фазу независимо от числа полюсов, в то время как в катушечных двухслойных обмотках таких перемычек — межгрупповых соединений — необходимо установить 2р — 1 на каждую фазу. Это обстоятельство существенно облегчает соединение схемы, особенно в многополюсных машинах. При симметричном расположении начал фаз также симметрично располагают перемычки и концы фаз. Если за начала фаз приняты верхние стержни пазов, то концами фаз также будут верхние стержни, а перемычки соединяют с нижними стержнями.
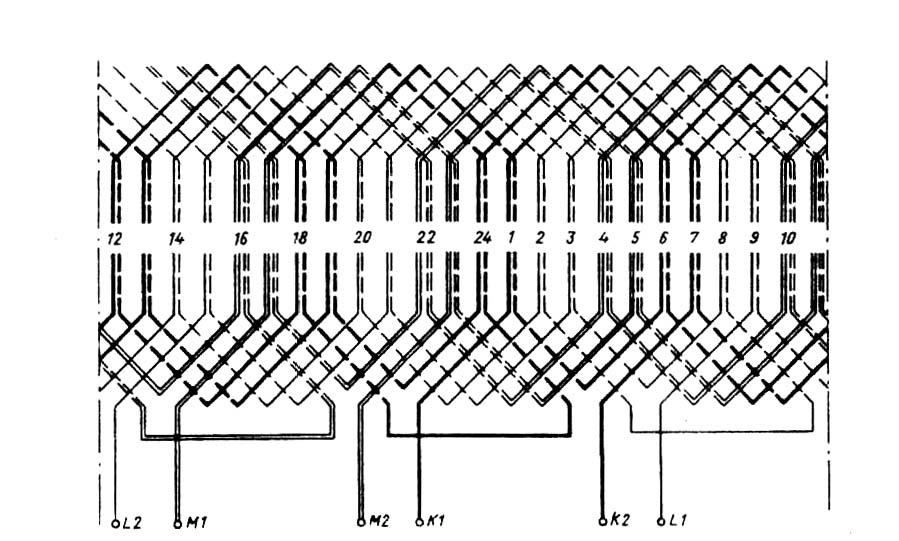
Рис. 3.41. Схема стержневой волновой обмотки фазного ротора, Z = 24, 2p = 4, a = 1
Находят применение также некоторые модификации рассмотренных схем обмоток роторов. Иногда в схемах выполняют укороченные переходные шаги по обходу ротора в одну сторону и удлиненные — в другую. В таких схемах перемычки смещаются на несколько пазовых делений, поэтому конструктивно выводные концы фаз не пересекаются с перемычками, что облегчает крепление лобовых частей.
Распространены также схемы обмоток фазных роторов, выполняемых без перемычек. В таких обмотках в каждой из фаз на месте последнего при прямом обходе стержня, который в обычных схемах соединяют с перемычкой (см., например, на рис. 3.41 нижние стержни в пазах 2, 10, 18), устанавливают изогнутый переходной стержень. На схеме одной фазы обмотки без перемычек (рис. 3.42) переходной стержень размещен в 26-м пазу (отмечен кружком на схеме). Переходной стержень изгибается так, что одна половина его по длине находится в нижнем слое паза, а другая — в верхнем. Обе лобовые части стержня отгибают в одну и ту же сторону. После установки переходного стержня направление обхода меняется на обратное так же, как после установки перемычек в рассмотренных ранее схемах. В такой обмотке концы фаз располагают на противоположной от начал фаз стороне ротора.
Отсутствие перемычек упрощает конструкцию обмоток и технологию соединения схемы. Расположение начал и концов фаз на разных торцах ротора облегчает установку выводных концов и соединительной шины на конечных выводах обмотки для соединения ее в звезду. В то же время наличие переходных, изогнутых по длине стержней требует их дополнительного
крепления в пазах (рис. 3.43).
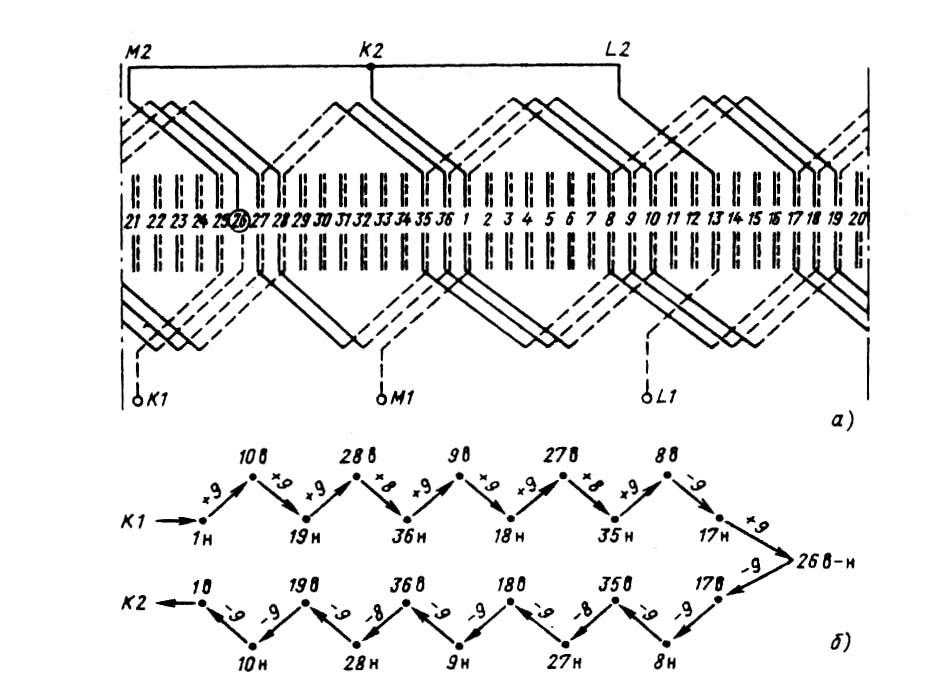
Рис. 3.42. Схема (а) и последовательность соединения (б) одной фазы
стержневой волновой обмотки фазного ротора с
переходным стержнем, Z = 36, 2p = 4
Волновую стержневую обмотку выполняют с одной и, реже, с двумя параллельными ветвями. Образование большего числа параллельных ветвей технологически сложно. Для получения двух параллельных ветвей перемычку между половинами фаз убирают и каждую часть обмотки соединяют с начальным и конечным выводами фаз сохраняя в них направление тока.
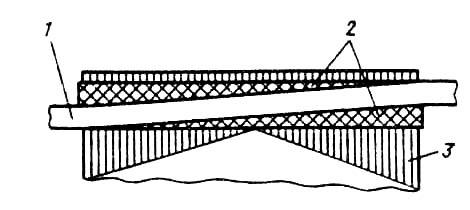
Рис. 3.43. Положение переходного стержня в пазу ротора:
1 – переходный стержень; 1 – уплотняющие клинья;
3 – сердечник ротора
В большинстве случаевстержневыеволновые обмотки роторов выполняют с целым число пазовна полюс и фазу. Однако на практике встречаются обмотки и с дробным q2. При q2 = b + с/d полюсное деление τ2 = m2q2 содержит дробное число пазовых делений (обмотки с d, кратным трем, в трехфазных машинах не применяют) и шаг обмотки выполняют с различными шагами: большими, равными у’ = τ2 + ε1 пазовых делений, и малыми, равными
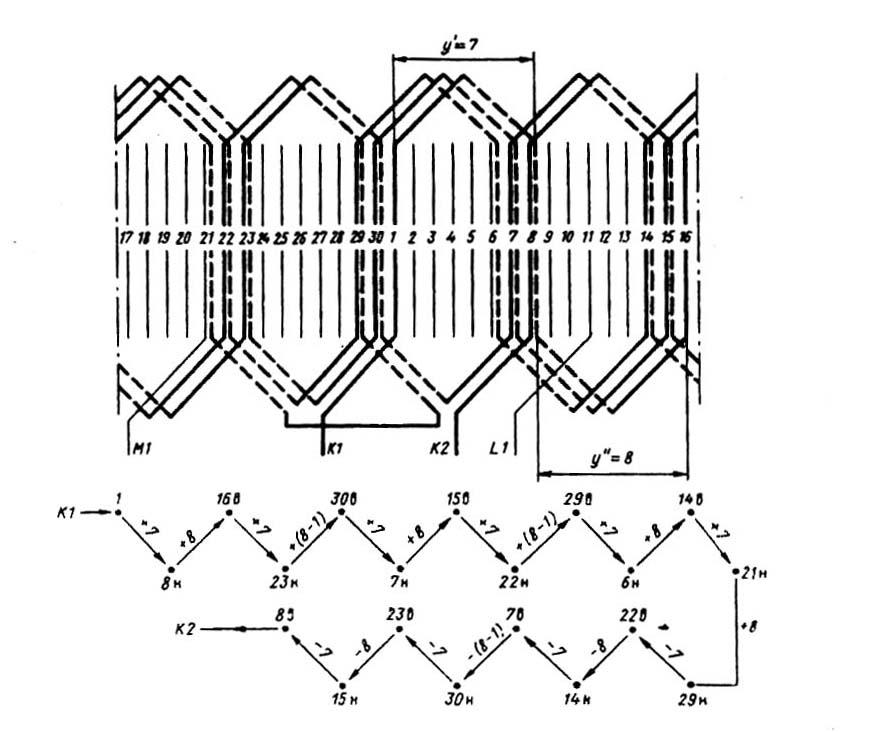
Рис. 3.44. Схема и последовательность соединения одной фазы
стержневой волновой обмотки фазного ротора, Z = 30, 2p = 4, q =
у» = τ2 – ε2 пазовых делений, где ε1 и ε2 — наименьшие дробные числа, при которых y’ и у» выражаются целыми числами. Количество больших и малых шагов, а также последовательность соединений стержней в схеме зависят от числа q2 и находятся аналогично числу и чередованию больших и малых катушечных групп в двухслойных катушечных обмотках с дробным q. Наиболее часто дробные обмотки фазных роторов выполняют при знаменателях дробности d = 2, т. е. с q2 =  ,
, и т. п. В таких обмотках большие шаги равны у’ = τ2 + 1/2, а малые у» = τ2 — 1/2 пазовых делений. Схему обмотки строят так же, как и при целом q2, но большие шаги чередуют с малыми. Последовательность чередования шагов до перемычки и после изменяется на обратную.
и т. п. В таких обмотках большие шаги равны у’ = τ2 + 1/2, а малые у» = τ2 — 1/2 пазовых делений. Схему обмотки строят так же, как и при целом q2, но большие шаги чередуют с малыми. Последовательность чередования шагов до перемычки и после изменяется на обратную.
На примере схемы обмотки с q2 = , приведенной на рис. 3.44, видно, что две (прямая и обратная) ветви обмотки располагают таким образом, что в каждой фазной зоне занято стержнями фазы q2 = 2 + 1/2 паза (три верхние половины паза и две нижние либо наоборот). В оставшейся свободной половине паза размещают стержень, принадлежащий соседней фазе.
Асинхронные электродвигатели с фазным ротором
В настоящее время, на долю асинхронных двигателей приходится не менее 80% всех электродвигателей, выпускаемых промышленностью. К ним относятся и трехфазные асинхронные двигатели.
Трехфазные асинхронные электродвигатели широко используются в устройствах автоматики и телемеханики, бытовых и медицинских приборах, устройствах звукозаписи и т.п.
Достоинства асинхронных электродвигателей
Широкое распространение трехфазных асинхронных двигателей объясняется простотой их конструкции, надежностью в работе, хорошими эксплуатационными свойствами, невысокой стоимостью и простотой в обслуживании.
Устройство асинхронных электродвигателей с фазным ротором

Основными частями любого асинхронного двигателя является неподвижная часть – статор и вращающая часть, называемая ротором.
Статор трехфазного асинхронного двигателя состоит из шихтованного магнитопровода, запрессованного в литую станину. На внутренней поверхности магнитопровода имеются пазы для укладки проводников обмотки. Эти проводники являются сторонами многовитковых мягких катушек, образующих три фазы обмотки статора. Геометрические оси катушек сдвинуты в пространстве друг относительно друга на 120 градусов.
Фазы обмотки можно соединить по схеме »звезда» или «треугольник» в зависимости от напряжения сети. Например, если в паспорте двигателя указаны напряжения 220/380 В, то при напряжении сети 380 В фазы соединяют «звездой». Если же напряжение сети 220 В, то обмотки соединяют в «треугольник». В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.
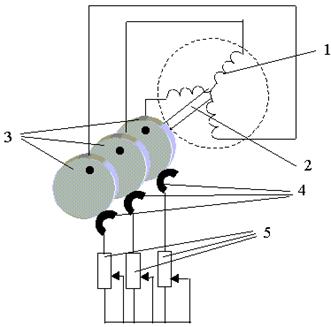
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).
Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
Принцип работы асинхронных электродвигателей
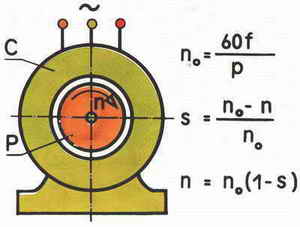
Принцип работы асинхронной машины основан на использовании вращающегося магнитного поля. При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в цепи ротора ток. В результате взаимодействия тока с результирующим малнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Отсюда и название двигателя асинхронный, т. е. несинхронный.
Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1
Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного пол, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю. При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поли (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом, в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключення (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором – это двигатель, который можно регулировать с помощью добавления в цепь ротора добавочных сопротивлений. Обычно такие двигатели применяются при пуске с нагрузкой на валу, так как увеличение сопротивления в цепи ротора, позволяет повысить пусковой момент и уменьшить пусковые токи. Этим асинхронный двигатель с фазным ротором выгодно отличается от АД с короткозамкнутым ротором.
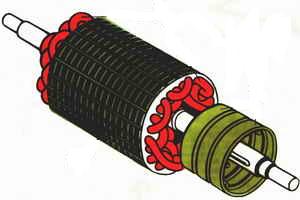
Статор (3) выполнен, так же как и в обычном асинхронном двигателе, он представляет из себя полый цилиндр, набранный из листов электротехнической стали, в который уложена трехфазная обмотка.

Ротор (4) по сравнению с короткозамкнутым, представляет из себя более сложную конструкцию. Он состоит из сердечника в который уложена трехфазная обмотка, аналогично обмотке статора. Отсюда название двигателя. Если двигатель двухполюсный, то обмотки ротора смещены геометрически друг относительно друга на 120. Эти обмотки соединяются с тремя контактными кольцами (2), расположенными на валу (5) ротора. Контактные кольца выполнены из латуни или стали, причем друг от друга они изолированы. С помощью нескольких металлографитовых щеток (обычно двух), которые расположены на щеткодержателе (1) и прижимаются пружинами к кольцам, в цепь вводятся добавочные сопротивления. Выводы обмоток соединяются по схеме «звезда».
Добавочное сопротивление вводится только при пуске двигателя. Причем им обычно служит ступенчатый реостат, сопротивление которого уменьшают с увеличением оборотов двигателя. Таким образом пуск двигателя осуществляется тоже ступенчато. После того, как разгон закончился и двигатель вышел на естественную механическую характеристику, обмотку ротора закорачивают. Для того, чтобы сохранить щетки и снизить потери на них, в двигателях с фазным ротором существует специальное устройство, которое поднимает щетки и замыкает кольца. Таким образом, удается повысить еще и КПД двигателя.
Добавочное сопротивление позволяет главным образом осуществить пуск двигателя под нагрузкой, работать с ним длительное время двигатель не может, так как механические характеристики слишком мягкие и работа двигателя на них нестабильна.
Для того чтобы автоматизировать пуск двигателя, в обмотку ротора включают индуктивность. В момент пуска, частота тока в роторе наибольшая, а значит и индуктивное сопротивление максимально. Затем, при разгоне двигателя, частота, как и сопротивление уменьшаются, и двигатель постепенно начинает работать в обычном режиме.
За счет усложнения своей конструкции, асинхронный двигатель с фазным ротором, обладает хорошими пусковыми и регулировочными характеристиками. Но по той же причине, его стоимость возрастает приблизительно в 1.5 по сравнению с обычным АД, кроме того увеличивается масса, размеры и как правило, уменьшается надежность двигателя.
Пазовая и междуфазовая изоляция.
В современных сериях двигателей широкое распространение получили композиционные материалы, представляющие собой сочетание полимерных пленок с различными гибкими электроизоляционными материалами на основе синтетических органических или неорганических волокон, причем указанные компоненты связаны между собой клеящими составами. Пленка принимает на себя основную электрическую и механическую нагрузки, в то время как другие компоненты выполняют функции армирующего материала, обеспечивающего необходимые технологические свойства композиции — жесткость, упругость, повышенную стойкость к механическим воздействиям и др.
Одной из важных функций волокнистых подложек является обеспечение надежной связи между поверхностями пазовой изоляции и прилегающими к ним катушками обмотки и сердечником за счет лучшей смачиваемости волокнистых материалов пропиточными составами по сравнению с пленками. Композиционные материалы обладают высокими механическими свойствами. Широко используются пленкосинтокартоны марок ПСК-Ф, ПСК-ЛП, состоящие из полиэтилентерефталатной пленки марки ПЭТФ, оклеенной с двух сторон бумагой из фенилонового или лавсанового волокна.
Для прокладок в лобовых частях применяют материалы с повышенным коэффициентом трения, такие, как пленкослюдопласт и пленкослюдокартон. Пропиточные и покровные составы. В двигателях современных серий широкое распространение нашли пропиточные составы без растворителей, что существенно уменьшило длительность процесса полимеризации, улучшило качество пропитки и теплопроводность изоляции. Для пропитки асинхронных двигателей современных серий применяются составы без растворителей марок КП-34, КП-50, КП-103. ЭКД-14, а также лаки с растворителями марок МЛ-92, ПЭ-933, КО-916К, КО-964Н. После пропитки и сушки на лобовую часть обмоток наносятся покровные составы для повышения стойкости обмотки к воздействию окружающей среды (пыль, масло, соляной туман, вредные примеси в воздухе и др.).
В качестве покровных составов применяют эмали ГФ92-ГС и ЭП91 (с растворителями) и компаунды КП-34, КП-50. Формы исполнения асинхронных двигателей определяются требованиями ГОСТ 2479-79 и разделяются на девять групп. Асинхронные двигатели серии 4А основного исполнения имеют четыре основные формы: IM 1081 — на лапах с двумя подшипниковыми щитами с одним цилиндрическим концом вала; IM 2081 — то же, что и IM 1081, но с фланцем на подшипниковом щите; IM 3081 — без лап с двумя подшипниковыми щитами, фланцем на подшипниковом щите и одним цилиндрическим концом вала со стороны привода; IM 9081 — встраиваемое исполнение с цилиндрической станиной (или без станины) с двумя подшипниковыми щитами и одним цилиндрическим концом вала со стороны привода. Как видно, условное обозначение двигателя по форме исполнения и способу монтажа состоит из латинских букв IM и четырехзначного числового индекса, первая цифра которого (от 1 до 9) определяет конструктивное исполнение, вторая и третья (от 00 до 99) — способ монтажа, четвертая (от 0 до 9) — условное обозначение конца вала. По степени защиты персонала от соприкосновения с токоведущим или движущимися частями, находящимися внутри машины, и попадания твердых посторонних тел и воды внутрь машины также существуют различные формы исполнения. В соответствии с ГОСТ 17494-72 для защиты электрических машин могут применяться 15 исполнений от IP00 до IP56. Для асинхронных двигателей напряжением до 1 кВ приняты две основные степени защиты IP23 и IP44.
Для некоторых специальных исполнений двигателей, работающих в пыльных и влажных помещениях, могут быть приняты степени защиты IP54, IP56. Двигатели, работающие в закрытых помещениях, могут иметь степень защиты IP22. Обозначение по способу защиты состоит из латинских букв IP и двух цифр, первая из которых (от О до 6) указывает на степень защиты персонала от соприкосновения и попадания посторонних предметов внутрь машины, а вторая (от 0 до 8) — на степень защиты от попадания воды:
исполнение IP22 — защита двигателя от проникновения внутрь корпуса твердых тел диаметром более 12 мм и от капель воды, летящих под углом не более 15° к вертикали;
исполнение IP44 — защита от твердых тел размером более 1 мм и от брызг, летящих в любом направлении;
исполнение IP23 — то же, что и IP22, но с защитой от дождя (капли дождя под углом до 60° к вертикали).
Способ охлаждения двигателей регламентируется требованиями ГОСТ 20459-75. Асинхронные двигатели общего назначения выпускаются с двумя способами охлаждения — с самовентиляцией (лопатки вентилятора расположены на роторе двигателя) типа IC01 и с наружным вентилятором, расположенным на валу двигателя, типа IC0141. Обозначение способа охлаждения состоит из латинских букв 1С, следующей за ними прописной буквы, обозначающей вид хладоагента (если охлаждение воздушное — эта буква опускается), и цифрового индекса, который указывает тип цепи для циркуляции хладоагента и способ его перемещения. В ряде модификаций двигателей применяются способы охлаждения IC0041 (естественное без вентилятора) и IC06 (охлаждение от пристроенного вентилятора, приводимого во вращение собственным двигателем).
Статьи по теме:
| Регулирование частоты вращения асинхронных двигателей. Регулирование частоты вращения двигателей определяется в соответствии с требованиями технологических процессов и тех производственных механизмов, в которых они используются. Оно характеризуется следующими основными показателями. . >>> |
| Монтаж электродвигателя. Перед монтажом электродвигателя необходимо выполнить работы, перечисленные в статье «Подготовка и пробный пуск электродвигателя» (осмотр машины, устранение возможных неисправностей, проверка вращения «от руки», измерение электрического сопротивления изоляции обмоток) . >>> |
| Энергосбережение при эксплуатации электродвигателей. Известно, что более половины всей производимой в мире электроэнергии потребляется электродвигателями в электроприводах рабочих машин, механизмов, транспортных средств. Поэтому меры по экономии электроэнергии в электроприводах наиболее актуальны . >>> |
§77. Асинхронный двигатель с фазным ротором

Асинхронный двигатель с фазным ротором (рис. 258 и 259) применяют для привода таких машин и механизмов, которые пускаются в ход под нагрузкой (краны, лифты и пр.). В подобных приводах двигатель должен развивать при пуске максимальный момент, что достигается с помощью пускового реостата (см. § 80).
В двигателе с фазным ротором статор выполнен так же, как и в двигателе с короткозамкнутым ротором. На роторе же расположена трехфазная обмотка, состоящая из трех, шести, девяти и т. д. катушек (в зависимости от числа полюсов машины), сдвинутых одна относительно другой на 120° (в двухполюсной машине), 60° (в четырехполюсной) и т. д. Числа полюсов обмоток статора и ротора берутся одинаковыми.

Рис. 258. Электрическая схема асинхронного двигателя с фазным ротором (а) и его условное графическое изображение (б): 1 — статор; 2 — ротор; 3 — контактные кольца со щетками; 4 — пусковой реостат

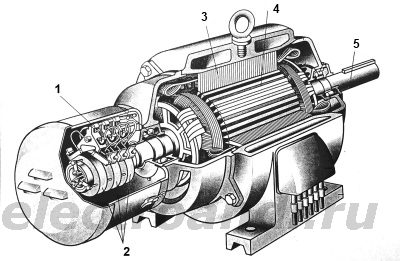
 Рис. 259. Основные конструктивные узлы асинхронного двигателя с фазным ротором: 1 — приспособление для подъема щеток; 2, 12 —- подшипниковые щиты; 3 — щеткодержатели; 4 — траверса; 5 — обмотка статора; 6 — остов; 7 — сердечник статора; 8 — коробка с выводами; 9 — сердечник ротора; 10 — обмотка ротора; 11 — контактные кольца
Рис. 259. Основные конструктивные узлы асинхронного двигателя с фазным ротором: 1 — приспособление для подъема щеток; 2, 12 —- подшипниковые щиты; 3 — щеткодержатели; 4 — траверса; 5 — обмотка статора; 6 — остов; 7 — сердечник статора; 8 — коробка с выводами; 9 — сердечник ротора; 10 — обмотка ротора; 11 — контактные кольца
Обмотку фазного ротора обычно соединяют «звездой». Концы ее присоединяют к трем контактным кольцам, к которым посредством щеток подключают трехфазный пусковой реостат, т. е. в каждую фазу ротора в момент пуска вводят дополнительное активное сопротивление.
Для уменьшения износа контактных колец и щеток двигатели с фазным ротором иногда снабжают приспособлениями 1 (см. рис. 259) для подъема щеток и замыкания колец накоротко после выключения реостата.



