Для многих любителей электроники и робототехники, создание собственного пульта управления для машинки является увлекательным и интересным проектом. С помощью платформы Arduino и некоторых компонентов вы можете создать функциональный и уникальный пульт, с которого можно будет управлять своей машинкой.
Arduino — это открытая платформа для создания электронных устройств и прототипирования. Она позволяет программировать различные датчики и компоненты, выполнить логику управления и создать интерфейс для взаимодействия с устройством. Для создания пульта для машинки нам понадобятся компоненты, такие как платы Arduino, модуль беспроводной связи, кнопки, потенциометры и другие элементы.
Создание пульта управления для машинки на Arduino предоставляет вам возможность настроить и адаптировать его специально под ваши нужды. Вы можете добавить не только возможность движения машинки вперед-назад и влево-вправо, но и дополнительные функции, такие как управление освещением или звуковыми эффектами. Самое лучшее в этом проекте — то, что вы можете использовать свои навыки и воображение, чтобы создать уникальный пульт управления, который подойдет именно вам.
Начало работы
Прежде чем приступить к созданию пульта управления для машинки на Arduino, необходимо подготовить все необходимые компоненты и инструменты:
- Плата Arduino (например, Arduino Uno)
- Беспроводный приемник и передатчик (например, модули NRF24L01)
- Резисторы (для подключения кнопок)
- Провода и соединители
- Кнопки (для управления машинкой)
- Программное обеспечение Arduino IDE
- Ноутбук или компьютер
После того, как все компоненты и инструменты готовы, можно приступить к подключению и настройке:
- Подключите модуль передатчика к плате Arduino с помощью проводов. Убедитесь, что подключение осуществлено правильно и надежно.
- Подключите кнопки к плате Arduino, используя резисторы для защиты.
- Скачайте и установите программное обеспечение Arduino IDE на компьютер.
- Откройте Arduino IDE и настройте его для работы с вашей платой Arduino.
- Откройте новый проект в Arduino IDE и напишите код для пульта управления машинкой.
- Скомпилируйте и загрузите код на плату Arduino.
- Подключите модуль приемника к машинке и убедитесь, что оба модуля связаны.
- Теперь вы можете использовать ваш собственный пульт управления для машинки на Arduino!
Важно помнить, что процесс создания пульта управления для машинки на Arduino может потребовать тщательности и внимания к деталям. Если у вас возникнут трудности или вопросы, не стесняйтесь обратиться к дополнительной литературе или в Интернет-сообщества Arduino.
Как сделать пульт управления для машинки
Пульт РУ для модели своими руками.

Радио управление и двигатели на ней стухли от влажности.
И вот руки добрались его оживить.
Задача:
— что бы все рулилось
— обратная телеметрия
— что бы сильнодешево.
За базу взял Ардуино Нано (130р) и радиомодули NRF24+ (150р). Экран .96″ (300р) (блин мелкий надо было 1.3″ брать).
От старого пульта не осталось ничего кроме пластика. Резисторы поменял на свои зафиксировав их макетной платой и приклеив к джойстику.
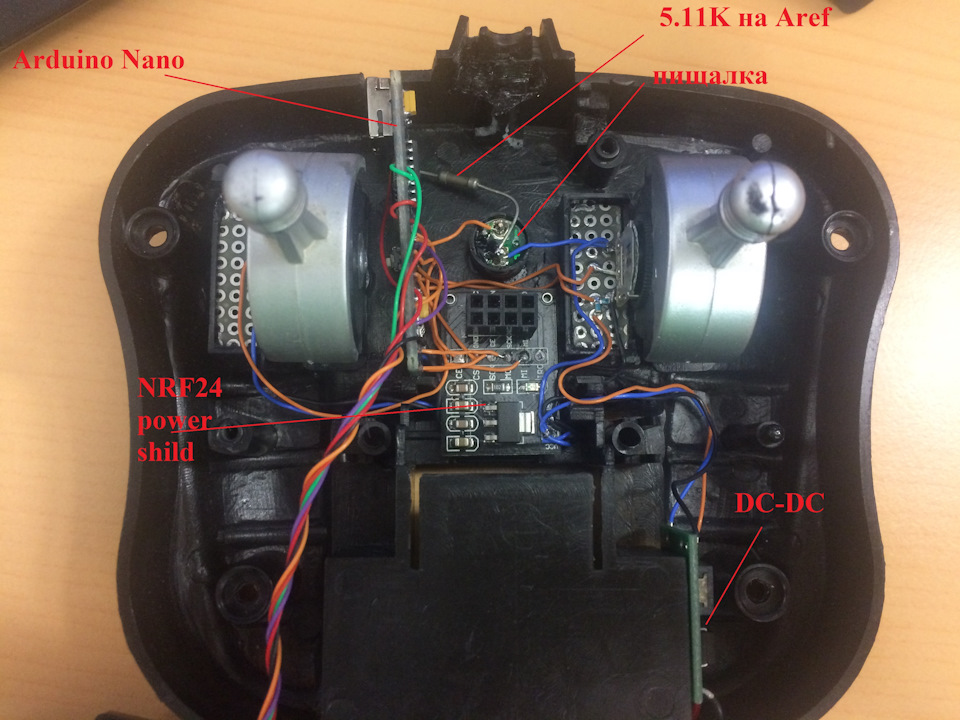
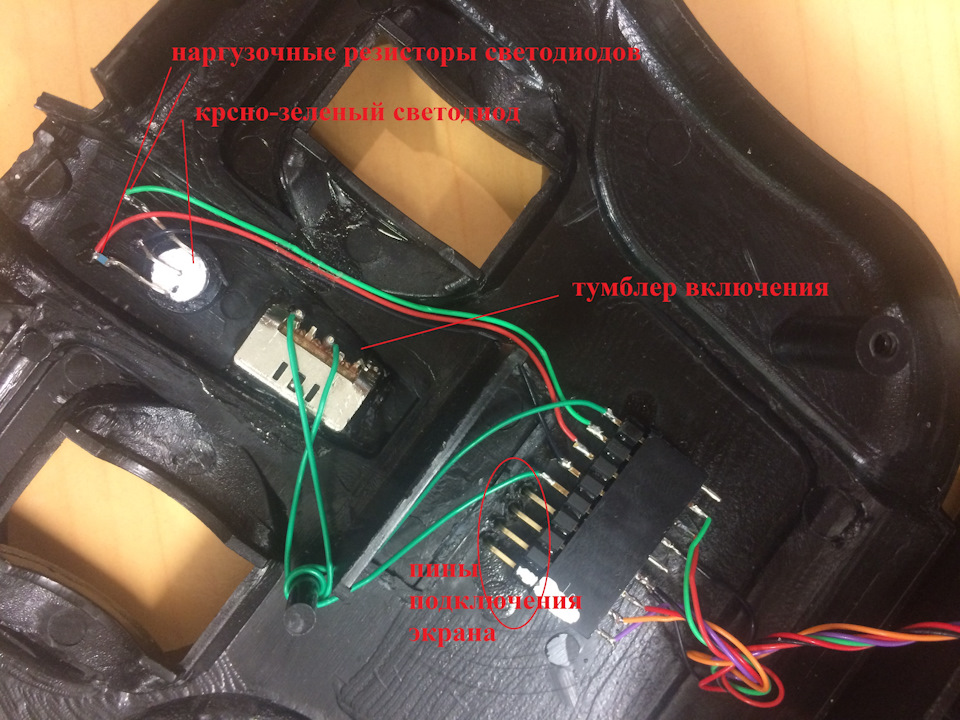

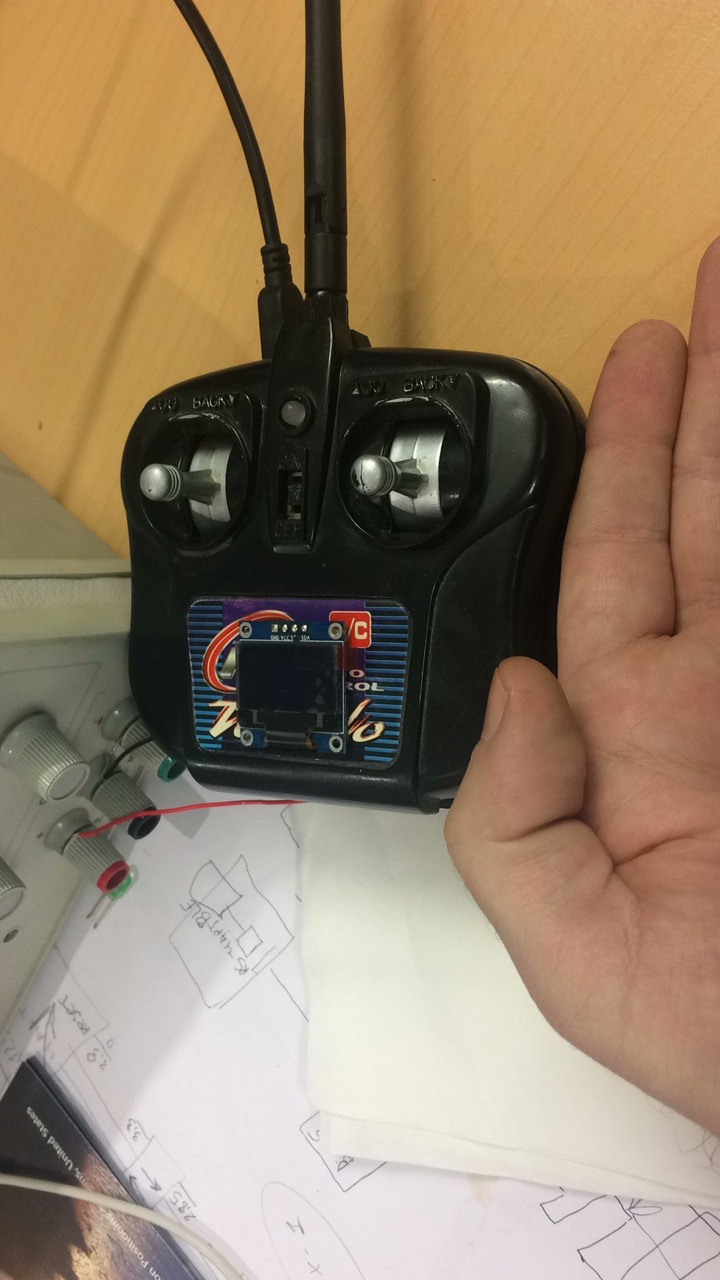

Пульт имеет пищалку. 2-х цветный светодиод. Умеет измерять и выводить на экран напряжение батареи. Умеет принимать от корабля его телеметрию и выводить на экран. Дальность связи до 1000м. Наличие устойчивой связи можно видеть на экране по напряжению батареи модели. Если обратной связи нет, значение будет нулевое (если модель не видит пульт более 1сек, то она останавливается). Частота обмена информацией модели с пультом 10 герц.
Радиомодули по совету друга были доработаны. Усилители на них шумят и их для увеличения дальности и отсутствия проблем необходимо экранировать.
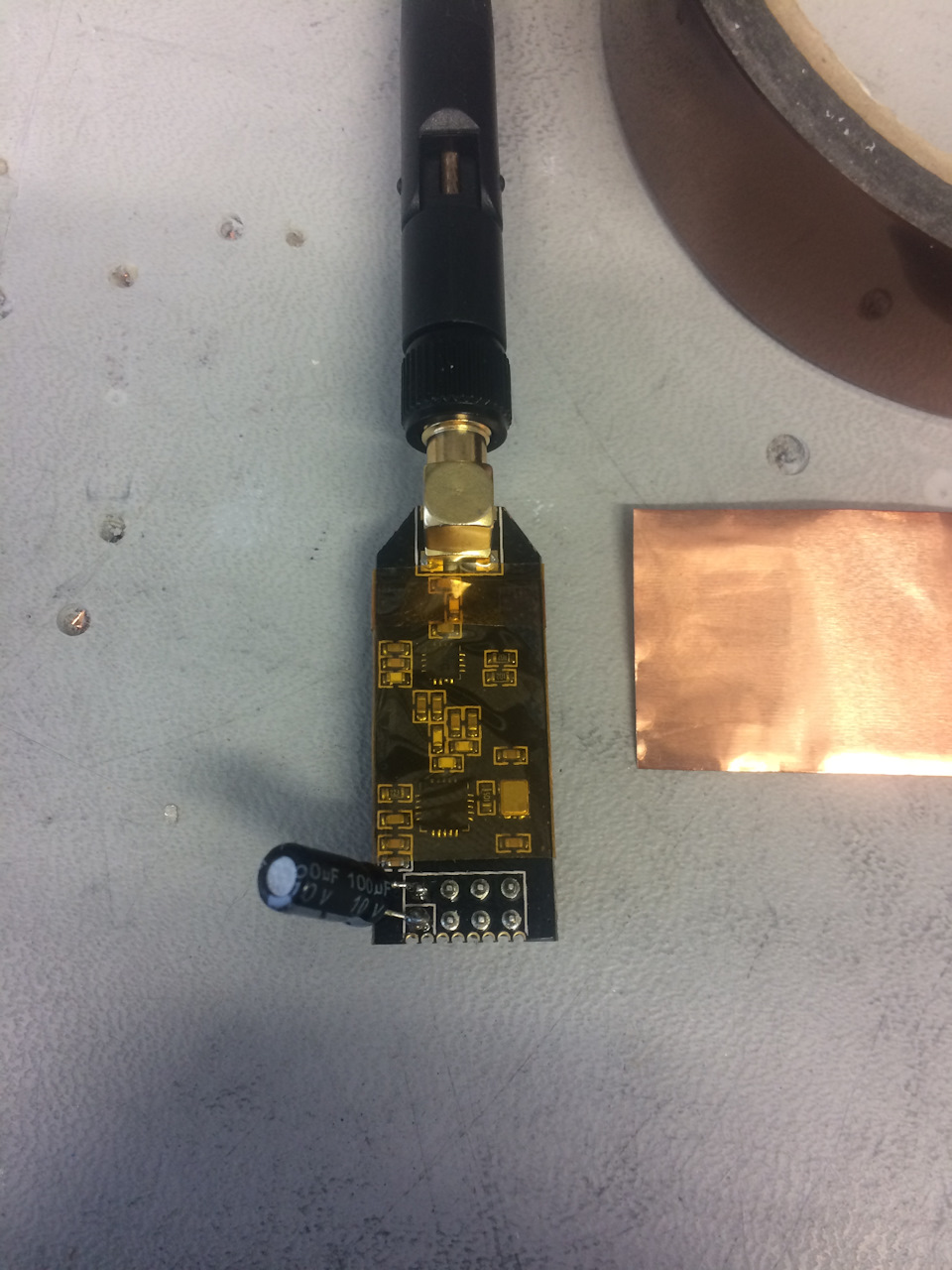
для начала оборачиваем скотчем. Затем фольгой.

Фольгу припаиваем к земле разъема антенны.
Для отладки программного обеспечения пришлось собрать симулятор электроники корабля.
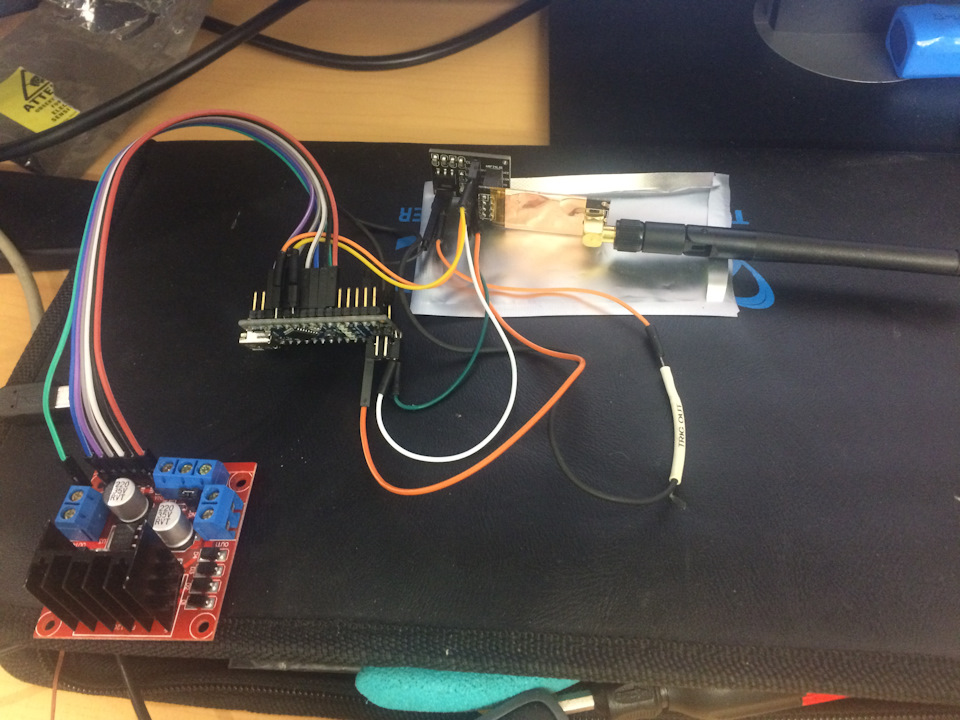
нано, nrf24+ и motor shild.
Сейчас находусь в ожидании двигателей для корабля из китая. Пульт завершен.
PS из того что пока не реализовано.
— режим калибровки пульта.
— добавление 3-х датчиков температуры в модель и вывод их в телеметрию (2 двигателя и радиатор платы их управления).
— софт для GPS и магнитометра на модели, что бы она при потери связи сама возвращалась на место запуска.
— автоматическая система борьбы за живучесть модели
— система антивандальная модели (китайцы у амеров сперли беспилотник, а мой будет лучше не трогать).
Схема спокойно читаема из софта, поэтому останавливаться на ней не буду.
yadi.sk/d/TiWUG4743E8LpH
Как сделать пульт управления для машинки своими руками
Простейшее радиоуправление. Специально для начинающих.
Решил сделать схемы которые делал в детстве и они у меня не получились и описать свои ошибки. Тогда я никак не мог понять почему я передатчиком посылаю одни команды, а приемником если и принимаю, со совсем что то непохожее. Сейчас я конечно знаю почему у меня так получалось, но в виду излишка свободного времени решил все это сделать в железе как тогда в детстве. Ностальгия наверное. Для начала взял самые простейшие схемы, Тем более форум просто забит вопросами «Как сделать радиоуправление на одну команду».
Когда начинал писать, то думал, что постепенно дойду и до сложных постепенно усложняя приемную и передающую часть., т.к. в каждом конкретном случае возникают проблемы совершенно разные. К примеру вместо сверхрегенератора применить для радиоуправления простую и дешевую микросхему TDA 7000 или TDA 7021.
Подход в этом случае будет немного другой, т.к. там будут действовать другие дестабилизирующие факторы. Конечно для профессионалов эта идея покажется смешной, но для начинающих в качестве первой конструкции по моему самое то и поняв общие принципы можно уже с понятием делать на специализированных микросхемах.
На TDA7000(70221) по моему и схема и настройка будет еще проще. В ней, при её простоте заложено довольно много возможностей для целей радиоуправления.
К сожалению статья моя раздулась до безобразия, а я успел только про примитивные сверхрегенераторы на 27 мгц написать, поэтому я ими и закончил
Понятно подходы выделения полезного сигнала при радиоуправлении различны для разных приемных и передающих систем. У каждой системы есть свои особенности.
Даже если взять тот же сверхрегенератор, но частоту взять раз в десять больше, то одно проблемы отпадут, но появятся новые.
К сожалению в этой статье до этого не дошел, хотя сам передатчик и приемник сверхрегенератор на частоту 225 мгц сделал.
На этих частотах обработка сигнала и его выделение проще, но труднее сама аппаратура, но при этом открываются большие возможности в конструировании малогабаритной аппаратуры радиоуправления на большие расстояния..
Вот даже моя примитивная система на 225 мгц работает в пределах квартиры без всяких антенн. Частоту взял именно эту просто из за того, что вытащил кварц на 25 мгц из старой сетевой карточки и сделал на его основе передатчик. Справа там просто мультивибратор на логике, что бы сигнал передатчика промодулировать.

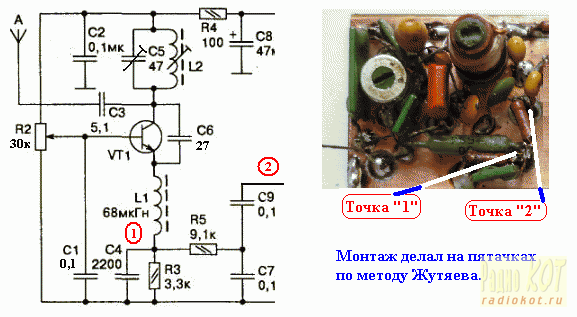
А это приемник сверхрегенератор на частоту 225 мгц.

Монтаж на пятачках. Считаю, что для макетов идеальный способ. Расположение пятачком делается в процессе монтажа и заранее неизвестно. Прочитать об этом способе можно в книге С.Г. Жутяев «Любительская УКВ радиостанция»
С этим все. Начинаю со сверхрегенераторами на 27 мгц, а там как получится.
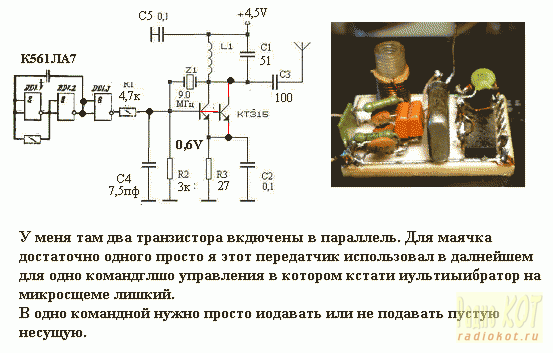
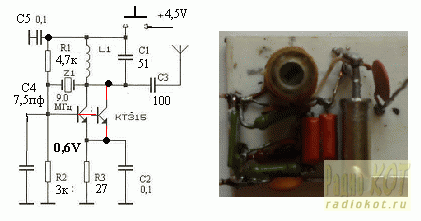
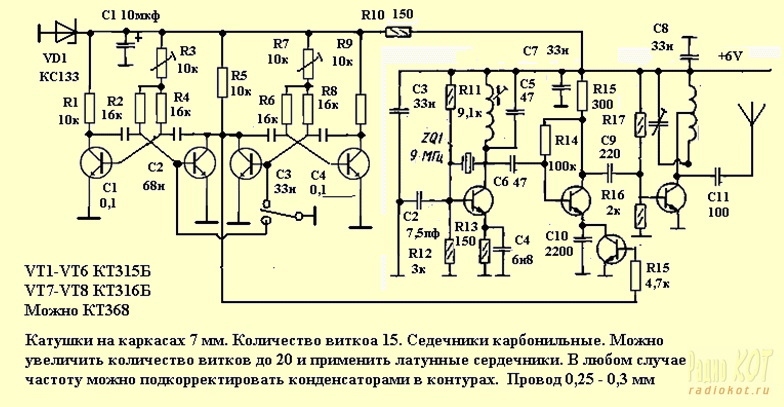
Понятно, что сначала нужно было сделать простейший маломощный передатчик — маячек для моих экспериментов. Схему сделал для данных целей самую примитивную. Сделал на трех транзисторах. Генератор на 27 мгц и мультивибратор на микросхеме. В дальнейшем этот мультивибратор для однокомандной апппаратуры будет лишний. Его приделал только для настройки. Питание 4,5 вольта.
Как говорил, схема сверхрегенератора классическая. Катушка такая же, как и в передатчике. Транзистор КТ315Б
Подключил к УНЧ и антенну длиной 15 см. Покрутил R2 и добился шумов суперизации.
Взял книжку книжку Г. Миль «Электронное дистанционное управление моделями» Подцепил осциллограф к точке «1» на схеме и как подозревал картинка моя было и близко на эту не похожа.
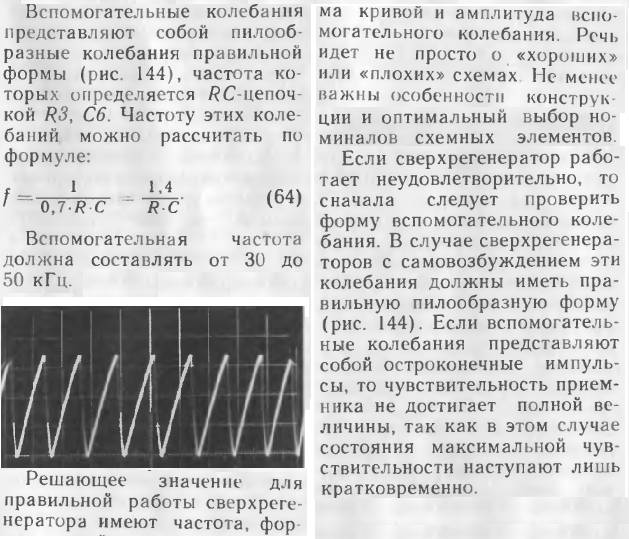
Что я только не крутил, но они форму менять не хотели или их уровень поднимался выше от нулевой линии, что тоже уменьшало чувствительность.
Дроссель в эмиттере у меня был самодельный. Намотано 50 витков провода на резисторе 100 ком. От отчаяния взял и поставил фабричный дроссель ДПМ-01 и произошло чудо. Осциллограмма сразу приняла приличный вид и чувствительность улучшилась.
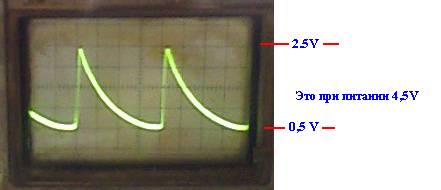
Стал экспериментировать с самодельными дросселями. Во всяком случае на 27 мгц наиболее близким к этому оказался намотанный на ферритовом кольце дроссель диаметром 10 мм. Витков 35. Тип феррита не знаю. Взял случайный. Дальше эксперименты прекратил, но понял, что дроссель в сверхрегенераторе очень важная часть и никогда его не нужно как иногда рекомендуют мотать просто на резисторе.
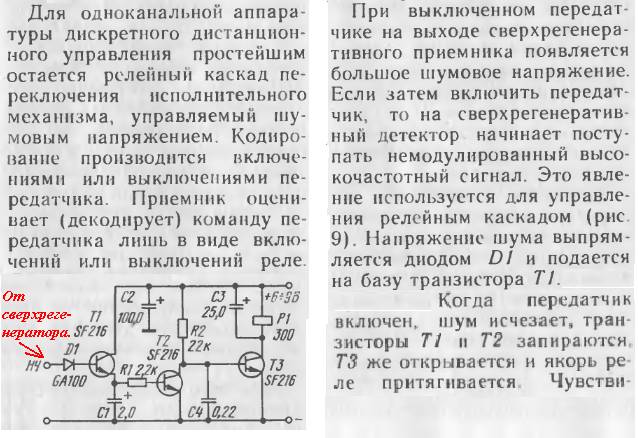
Настала пока делать однокомандную управление. В теории все просто выглядит. Когда несущей нет, то сверхрегенератор сильно шумит. Этот шум нудно выпрямить и использовать как команду. Если подать просто несущую, т.е. включить передатчик без модуляции, то эти шумы пропадают. После детектора получается ноль, а это равносильно подаче команды. Эта система привлекает тем, что когда передатчик отключен, то на выходе приемника нет ложных команд. Шумит он и шумит.
Вот и у Г. Миля об этом написано.
Такая привлекательная простая схема. Жалко, что на практике она очень нестабильно работает. Так и у меня в те годы получилось и решил я её добить. Может кому пригодится. Дело в том, что на выходе сверхрегенератора присутствует переменное напряжение суперизации, как видели оно порядка единиц вольт, хотя и частота у него намного больше напряжения шумов, но величина шумов всего лишь несколько милливольт и эффективно отделить их очень затруднительно. Конечно идеальный случай поставить НЧ трансформатор или ФНЧ на L С элементах, но лень мотать тысячи витков. Хотя в давние времена люди были не такие ленивые и мотали такое.
Здесь нужно заметить, что если сверхрегенератор использовать для приема голоса, то сильное подавление частоты суперизации можно не делать. Просто не нужно будет подавать на УНЧ сильный сигнал, что бы не загонять его в режим отсечки этим напряжением суперизации. В нашем случае это напряжение нужно убрать как можно сильнее. На выходе сверхрегенератора стоит примитивный фильтр НЧ на R 5, С7 но все, на что он способен, так получить на его выходе вот такое с амплитудой порядка 0,2 вольта, а шумов при таком на экране осциллографа еще и не видим, хотя они там точно есть. Амплитуда этих шумов совсем мала. Это картинка в точке «2»
Если присмотреться, то наши шумы чуть видны в верхней части этих импульсов.
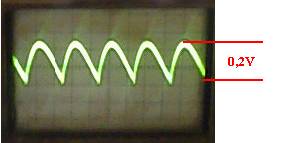
При таком безобразии приемник будет реагировать не на шумы, а на эти импульсы.
Т.к. ни LC фильтр мне не хочется, ни трансформатор ставить, то остается единственны путь, это поставить активный RС фильтр с частотой среза в несколько килогерц.
Взял опять на транзисторе. После фильтра поставил усилитель с маленьким выходным сопротивлением и получил основной блок для дальнейших экспериментов.
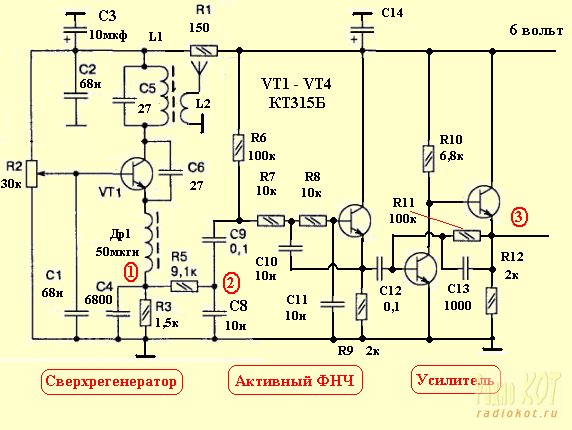
Если теперь посмотреть сигнал в точке «3» при отсутствии несущей, то видим только шум сверхрегенератора приличной амплитуды. Он то и является в нашем случае сигналом команды.

Кстати макет базового блока так выглядит. Виден монтаж на пятачках. Конструкция довольно жесткая. Можно спокойно её бросать и ничего с ней не будет. Все сделано на выводах деталей обрезанных до размера 1 – 2 мм
Единственно желательно сердечник катушки закрепить.

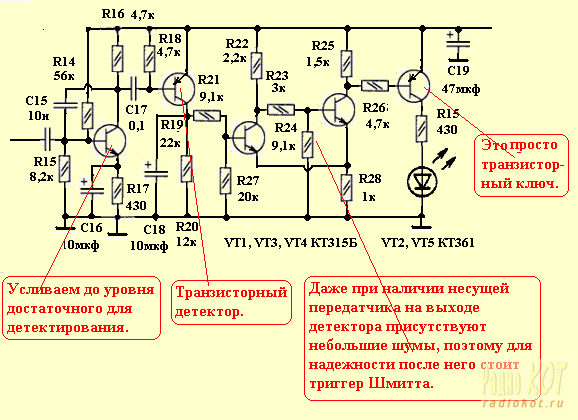
Теперь имея базовый блок делаем для начала простейшее однокомандное управление.
Принцип простой. Шумы уже выделили. Теперь их усилим, продетектируем, подадим на триггер Шмита и дальше на силовой ключ. Если передатчик не включен, то светодиод горит. При включении передатчика шумы пропадают и светодиод гаснет. Если нужно другая логика, то нужно добавить еще один ключ или вместо светодиода поставить реле, но это уже нюансы.
Это макет однокомандного управления так выглядит.

Передатчик для него до безобразия просто выглядит. Просто генератор на кварце 9 мгц работающий на третьей механической гармонике. Его просто включают или выключают.
В принципе можно сделать и без кварца. Для увеличения мощности в генераторе поставил два транзистора КТ315 в параллель, что тоже необязательно. Можно один или что то мощнее, например КТ603 или КТ3117
А это полная схема. Вверху базовый блок, снизу дешифратор команды.
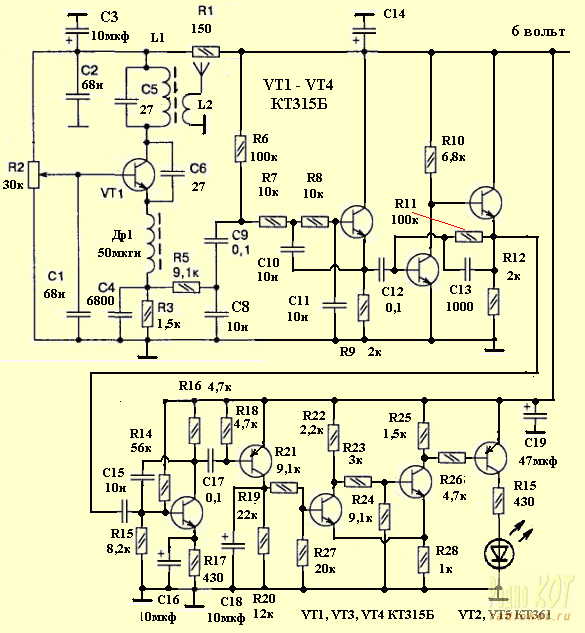
Деталей получилось довольно много, но это компенсируется простотой и наглядностью настройки, где каждый каскад выполняет одну определенную функцию.
Теперь, как и задумал элементарные принципы передачи нескольких команд. Я взял две команды, хотя по этому принципу можно сделать порядка четырех.
Принцип частотного разделения каналов. Принцип широко известен. Правда для разделения каналов в аналоговых системах обычно применяют избирательные LС фильтры, но это не для ленивых, а коты как известно здорово ленивые.
Вот здесь схема с катушками из книги Г. Миля.

Поэтому фильтры решил взять активные на RС. Схем много перепробовал, но не понравились. Больше понравился фильтр Мюллера Фогта. О нем тоже в книге Г. Миля написано.

Базовый блок прежний, только после него вместо усилителя и триггера Шмита пришлось поставить усилитель-ограничитель, т.к. случались ложные срабатывания когда передатчик расположен близко от приемника. Было одновременное срабатывание двух соседних каналов. Когда поставил ограничитель и ограничил величину сигнала поступающих на фильтры, этот дефект пропал.
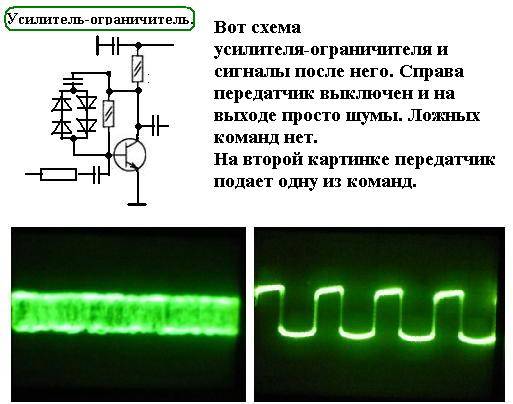
И наконец полная схема вместе с фильтрами и выходными ключами. Частоты я брал случайные. Первая получилась 1200 гц, вторая 750 гц. Желательно, что бы они не делились на целое число и не создавали в тракте гармоники, т.е. выбор 1200 гц и 600 гц был бы совсем не удачен в данном случае.
Само собой схемы фильтров можно взять и другие, но мне эти понравились.
А это внешний вид макета.

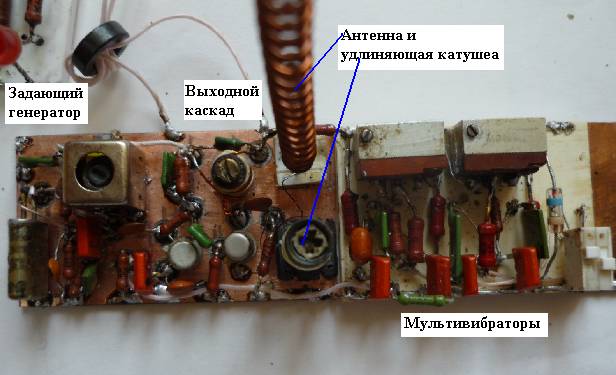
Теперь к передатчику можно переходить. Схема стандартная. Задающий генератор на кварце 9 мгц. Кварц работает на третьей механической гармонике. Дальше идет апериодический буферный каскад в котором происходит также модуляция. Подобная схема модуляции позволяет сделать большую скорость передачи, хотя требует дополнительного каскада. Выходной каскад самый примитивный. Если в нем предусмотреть цепи согласования с антенной, то параметры его конечно улучшаться. Так же можно в оконечном каскаде поставить и более мощный транзистор, хотя бы КТ603, но у меня не было этих целей. Я начал антенну согласовывать, но бросил, т.к. дальности для моих экспериментов и так хватало, а так при желании мощность его можно существенно увеличить особо не раздувая габаритов.
Модулятор по сути два мультивибратора работающих на разных частотах.
На схеме все понятно. Включаем или один мультивибратор или другой.
Там резистор R17 можно подобрать для увеличения мощности, но я не стал. Мне большая мощность не нужна была для экспериментов.
А это макет передатчика с которым я экспериментировал. Система само собой полностью работоспособная. Там видна спиральная антенна и удлиняющая катушка. Окончательно я её не настроил, т.к. большой дальности не преследовал на данном этапе своих экспериментов.
Силы мои иссякли, да и по опыту знаю, что чем длиннее статья, тем меньше охотников дочитать её до конца. Хотел сделать еще дистанционный аналоговый термометр, но выдохся. Просто на входе модуляции передатчика поставить генератор управляемый напряжением, а в качестве дешифратора приемника поставить преобразователь частота-напряжение. Такие ставили в аналоговых частотомерах.
В заключение хочу сказать, что конечно вместо примитивных шифраторов и дешифраторов на транзисторах здесь можно поставить более совершенные шифраторы и дешифраторы на логике или на МК в которых предусмотреть дополнительно свою систему зашиты достоверности информации дополнительно к этой, хотя не вижу смысла делать такое к таким примитивным передатчикам и приемникам.
Пульт радиоуправления моделями своими руками

Всем привет. Представляю на общее обозрение самодельный пульт радиоуправления для управления различными объектами на расстоянии. Это может быть машинка, танк, катер и т.д. изготовленное мной для “детского” радио кружка. С применением радио модуля NRF24L01 и микроконтроллера ATMEGA16.
Давно у меня лежала коробка одинаковых поломанных игровых джойстиков от приставок. Досталась от игрового заведения. Особого применения в неисправных игровых джойстиках я не видел, да и выкидывать или разбирать жалко. Вот и стояла коробка мертвым грузом пылилась. Идея применения игровых джойстиков, пришла, как только пообщался со своим приятелем. Приятель вел кружок для юных радиолюбителей в интернате, причем бесплатно по выходным, приобщал любознательных детишек к миру радиоэлектроники. Дети они ведь как губка, впитывают информацию. Так как я сам очень приветствую подобные кружки для детей, а тут еще и в таком месте. То и предложил идею, как задействовать нерабочие джойстики. Идея заключалась в следующем: создать самодельный радио дистанционный пульт управления моделями, собранными своими руками, который хотелось бы предложить детям для изучения проекта. Идея ему очень понравилась, учитывая, что финансирование детских учреждений мягко сказать не очень, да и мне был интересен данный проект. Пускай я тоже внесу свою лепту в развитие радио кружка.
Цель проекта создать законченное устройство не только как радио дистанционный пульт, но и ответную часть на радиоуправляемый объект. Учитывая, что пульт для детей то и подключение приёмной части на модель, также должно быть по возможности простым.
Сборка и комплектующие:

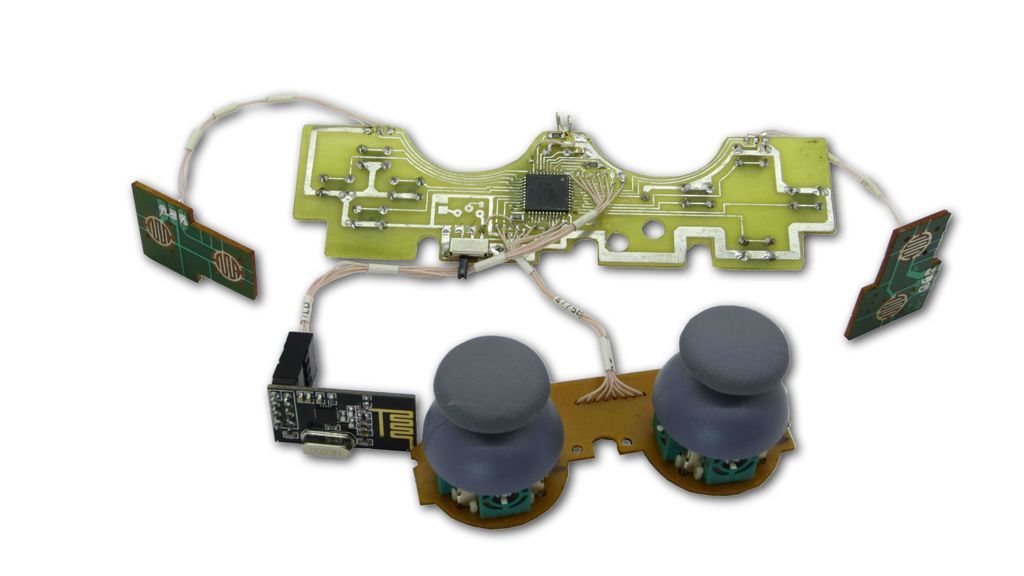
Разобрав игровой джойстик на составляющие, сразу стало ясно, нужно изготовить новую печатную плату, причем, весьма необычной формы. Сначала, хотел развести печатную плату на микроконтроллер ATMEGA48, но как оказалось портов микроконтроллера просто не хватает под все кнопки. Конечно, такое количество кнопок в принципе не нужно и можно было ограничиться только четырьмя портами микроконтроллера АЦП для двух джойстиков и два порта для тактовых кнопок, размещенных на джойстиках. Но мне захотелось по возможности максимально большое количество кнопок задействовать, кто знает, чего там детишки ещё захотят добавить. Так была рождена печатная плата под микроконтроллер ATMEGA16. Сами микроконтроллеры у меня были в наличии, остались от какого-то проекта.
Резинки на кнопках очень сильно были изношены, и восстановлению не подлежали. Но это не удивительно учитывая, где джойстики использовались. По этой причине применил тактовые кнопки. Пожалуй, к минусам тактовых кнопок можно отнести сильное щелканье, возникавшие в результате нажатия на кнопку. Но для данного проекта это весьма терпимо.
Плату с джойстиками не пришлось переделывать, оставил какая есть, что значительно сэкономило времени. Торцевые кнопки также сохранил в первоначальном виде.
В качестве приемопередатчика выбрал радиомодуль NRF24L01, так как цена весьма мала в Китае по цене 0.60$ за шт. купил. Несмотря на свою малую стоимость, радиомодуль обладает не малыми возможностями и конечно мне подходил. Следующей проблемой, с которой столкнулся, а собственно где радиомодуль разместить. Пространство в корпусе свободного маловато, по этой причине радио модуль разместил в одной из ручек корпуса джойстика. Даже фиксировать не пришлось, модуль плотно прижимался, когда собирался полностью корпус.

Пожалуй, самой большой проблемой стал вопрос с питанием для радио пульта. Покупка каких-то специализированных аккумуляторов, скажем литиевых, влетало в немалую копеечку, так как собирать решено было семь комплектов. Да и оставшееся свободное пространство в корпусе не очень позволяло использовать стандартные аккумуляторы серии AA. Хотя потребление и не значительное можно использовать разные подходящие источники питания. Как всегда, на помощь пришла дружба, коллега на работе подогнал аккумуляторы литиевые плоские от мобильных телефонов и бонусом зарядки к ним. Все же немного пришлось переделать их, но это незначительно и гораздо лучше, чем делать с нуля зарядку для аккумуляторов. Вот на плоских литиевых аккумуляторах я и остановился.
В процессе испытания радио модуль, свою заявленную дальность оправдал и уверенно работал по прямой видимости на расстоянии 50 метров, через стены дальность значительно уменьшилась. Также было в планах установить вибромотор, который реагировал, скажем на какие-то столкновения или другие действия в радиоуправляемой модели. В связи с этим предусмотрел на печатной плате транзисторный ключ для управления. Но дополнительные усложнения я оставил на потом сначала нужно обкатать программу, так как она ещё сыровата. Да и конструкция, учитывая, что это прототип требует мелких доработок. Вот так как говорится “с миру по нитке”, практически с минимальными вложениями был создан пульт радиоуправление.
Блог
- Post category: Arduino / Программирование / Проекты на Ардуино
- Post comments: 0 комментариев
- Запись опубликована: 01.08.2021

Вы наверняка знаете, что можете использовать Bluetooth или Wi-Fi для управления радиоуправляемым устройством, и для этого вам нужен только телефон с соответствующим приложением в качестве передатчика.
Однако этот метод не будет работать, если расстояние окажется слишком большим. Автор данного проекта показал, как собрать простой пульт для радиоуправления с дальностью до 700 м.
У каждого, наверное, в детстве была радиоуправляемая машинка или лодка. И вы, наверняка, понимаете как такое устройство работает. Но профессиональное модельное оборудование может быть слишком дорогим, а пульты дистанционного управления, используемые в очень дешевых моделях, не очень-то хороши. Поэтому иногда стоит попробовать собрать собственный пульт.
Энтузиаст DIY, ведущий канала How To Mechatronics на YouTube, решил использовать популярные электронные модули для создания эстетичного и универсального пульта дистанционного управления. Сердце устройства — Arduino Pro Mini, к которому подключены все необходимые периферийные устройства.

Пульт дистанционного управления оснащен 2 джойстиками, 2 потенциометрами, 2 переключателями и 6 кнопками. Также устройство оснащено акселерометром и гироскопом I2C (MPU6050), благодаря которым он может реагировать на жесты оператора.
Читать также: Командная консоль и основы Linux
Радиосвязь была реализована с помощью дешевых радиомодулей NRF24L01 (2,4 ГГц), которые связываются с Arduino через интерфейс SPI.

Автор хотел сделать пульт универсальным, чтобы его можно было бы использовать для связи с различными устройствами. Все данные хранятся в удобной структуре, которая передается и принимается без изменений. Это позволяет любому устройству, которое знает формат этой структуры, правильно интерпретировать полученные данные.
Работу устройства и инструкцию по сборке можно найти в подготовленном автором видео:
В связи с тем, что пульт предназначен для использования в различных проектах, автор позаботился и о его эстетическом виде. Все собрано на черной печатной плате, которая с двух сторон закреплена с помощью оргстекла.

Благодаря использованию готовых модулей, устройство получилось относительно дешевое и простое в изготовлении. Если вы заинтересованы в воссоздании этого проекта, в дополнение к приведенному выше видео вам также следует посетить веб-сайт автора этого пульта дистанционного управления, где вы сможете найти руководство по сборке, там также доступны программные коды. А у вас есть идея интересного использования такого оборудования? Напишите об этом в комментариях!
Читать также: Как подключить Arduino Uno к Android через Bluetooth
С Уважением, МониторБанк
Программирование пульта управления
После того, как вы собрали свой пульт управления для машинки, настало время настроить его программное обеспечение. Для этого вам понадобятся знания в программировании и некоторые инструменты.
Выбор языка программирования
Первым шагом является выбор языка программирования. При выборе языка следует учесть свои предпочтения и уровень навыков. Возможные варианты включают C++, Python, Java и другие.
Установка и настройка IDE
После выбора языка программирования необходимо установить и настроить IDE (интегрированная среда разработки). IDE предоставляет средства для написания, отладки и компиляции программы. Популярными вариантами IDE являются Visual Studio, Eclipse, PyCharm и другие.
После установки IDE необходимо настроить проект для работы с пультом управления. Это может включать в себя настройку портов связи и библиотек для работы с устройством.
Написание программы
После настройки IDE можно приступить к написанию программы. Вам потребуется описать логику управления машинкой с помощью кода. Например, вы можете задать действия для каждой кнопки на пульте: вперед, назад, влево, вправо и т.д.
Для взаимодействия с машинкой вам пригодятся различные функции и методы, которые предоставляет выбранный вами язык программирования. Например, вы можете использовать функцию для установки скорости движения машинки или метод для поворота колес.
Тестирование программы
После того, как вы написали программу, необходимо протестировать ее работу. Подключите пульт управления к компьютеру, запустите программу в IDE и проверьте, как машинка реагирует на ваши команды. Если что-то не работает, проверьте код программы и настройки подключения.
| Выбрать язык программирования |
| Установить и настроить IDE |
| Написать программу |
| Протестировать программу |
Тестирование и настройка пульта
После того, как вы собрали свой пульт управления для машинки, важно провести тестирование и настройку, чтобы убедиться, что все работает корректно. В этом разделе мы рассмотрим основные шаги, которые помогут вам проверить и настроить ваш пульт.
1. Проверка подключения
Первым шагом является проверка подключения всех компонентов пульта. Убедитесь, что все провода и детали правильно подключены и не имеют видимых повреждений. Проверьте, есть ли достаточное электрическое соединение между пультом и машинкой.
2. Тестирование кнопок
После успешной проверки подключения, перейдите к тестированию кнопок на пульте. Нажмите каждую кнопку и убедитесь, что сигнал от кнопки правильно передается на машинку. Для этого можно использовать мультиметр или специальное программное обеспечение для тестирования кнопок.
Совет: Если вы обнаружите, что какая-то кнопка не работает, проверьте подключение и убедитесь, что вы правильно настроили ваш пульт.
3. Проверка дальности действия
Одним из важных аспектов пульта управления является его дальность действия. Убедитесь, что сигнал от пульта передается на машинку на достаточном расстоянии. Проведите тест путем перемещения машинки на разные расстояния от пульта и проверьте, работает ли она на всех дальностях.
4. Настройка параметров
Если вы обнаружите, что машинка неправильно реагирует на команды с пульта, возможно, вам потребуется настроить параметры управления. Это может включать в себя регулировку чувствительности, скорости или других функций машинки. Обратитесь к инструкции по сборке или руководству пользователя, чтобы узнать, как можно настроить вашу машинку.
Заметка: Не забудьте сохранить все настройки, чтобы в будущем не проводить повторные настройки.
После успешного тестирования и настройки, ваш пульт готов к использованию. Наслаждайтесь управлением своей машинкой своими руками!
Как собрать машинку на пульте управления. Пульт радиоуправления моделями своими руками

//optAd360 — 300×250 —> С детства у меня была тяга к игрушкам. Но больше всего меня интересовали радиоуправляемые игрушки. В детстве у меня не было таких игрушек. Сами понимаете ссср родители не могли позволить себе такое. Что касается кружков радио любителей этого тоже не было. А как этого хотелось. Когда уже вырос появилось возможность купить любую игрушку. Тяга по прежнему была сильной. Но покупать готовое решение было не интересно. Главное же не сама игрушка а сделать что-то самому. И я решил сделать радиоуправляемый самолет своими руками. После многих просмотров различных материалов и чертежей я остановился на пенокартоне. Пенокартон это удивительно легкий и прочный относительно материал. И для самолета это просто идеальный материал. Кстати и не только для самолета. Пенокартон бывает разных диаметров я встречал 0. В рунете полно вариантов самолета своими руками и с другими материалами. Главное прочность и легкость материала. Прикупил я несколько листов пенокортона толщиной 3 мм. Размер х мм. Для небольшого самолета достаточно и двух листов. Для того чтобы вам сделать самолет с правильными пропорциями и чтобы он подчинялась законам аэродинамики вам нужно обладать некими знаниями или скачать чертежи в интернете. Я поленился и пропустил этот момент. Конечно для радиоуправляемого самолета не нужны расчеты как в авиастроении, но все же надо учесть некоторые моменты. Из готовых эскизов собираем самолет с помощью пистолета клея. Принцып построения самого самолета показано в этом видео. Весь самолет был построен по этому принципу. Вот из этого что получилось у меня. Я для красоты обтянул самолет самоклеющейся пленкой. Для органов управления самолетом необходимо докупить детали. Обычно я покупаю детали на китайских сайтах. ПО мне лучше подождать дней нежели переплатить большую сумму. Мотор — Mystery Бесщеточный электродвигатель оборотов в минуту 11,1V заказал на китайском сайте. Регулятор скорости тоже поддерживает напряжение Заказал на китайском сайте. Серво приводы — сервомашинки. Обычные маленькие. Органы управления радиоуправляемого самолета такие же как и у настоящего самолета. Отличие только в отсутствии закрылок. Но можно применить. Для управления самолетом заказал пульт управления 4х канальное. Бюджетный вариант. Купил на сайте Алиэкспрес за рублей. Пульт продается вместе с приемником. Схема подключения: Чтобы правильно подключить электронику используйте инструкцию. В основном все приемники подключается одинаково. Для подключения 2 сервоприводов на элероны используйте У кабель. Но этот кабель можно и самому сделать. При этом нужно поставить сервомашинки так чтобы они при движении двигались в разные стороны. Схема подключения электроники к приемнику радиоуправляемого самолета. Пока я испытывал свой самолет я успел испортить 3 воздушных винта. Поэтому нужно учесть возможности поломки и закупить больше винтов. Надо сказать, что на современном рынке радиоуправляемых машин сегодня переизбыток, но заполнен он моделями, как правило, китайского производства, хотя среди них вы найдете изделие практически на любой вкус. Однако всегда находятся умельцы, которых не устраивают текущие предложения или они считают, что радиоуправляемая машинка, своими руками собранная, всегда будет лучше, чем даже хорошие конвейерные экземпляры. Именно для начинающих умельцев и написана наша сегодняшняя статья. Начнем с необходимых инструментов, а затем опишем порядок работы и дадим некоторые полезные советы. Ну а теперь переходим к схеме, то есть к процессу создания качественной модели РУ-машинки. Для начала собираем подвеску — именно для этого нам и понадобится базовая моделька и аккумулятор 12 В. Выглядеть это будет примерно так:. Теперь берем ВАЗовские соленоиды и пластмассовые шестеренки и собираем редуктор. На шпильках и корпусе нарезаем резьбу, чтобы можно было навесить шестеренки и соленоиды. Все должно получиться примерно как здесь:. Теперь подключаем редуктор к питанию и проверяем, после чего устанавливаем редуктор в машину, если прошел проверку. Устанавливаем радиатор в целях защиты схемы от перегрева. Пластину радиатора, кстати, можно очень надежно закрепить при помощи болтов. После этого устанавливаем микросхемы силового драйвера и радиоуправления. Их хорошо видно на этом фото:. Ну, а затем полностью собираем корпус нашего авто. После этого можно приступать к тестовым запускам автомобиля. А теперь несколько советов. Итак, у вас есть радиоуправляемая машина, как сделать так, чтобы она была маневренной и надежной? Во-первых, не перегружайте модель лишними деталями и системами. Поэтому главное, на чем нужно сконцентрироваться — это сделать хорошую подвеску и обеспечить надежную передачу сигнала. Ну а в улучшении маневренности и в оптимизации скоростных характеристик вам поможет доводка систем во время тестовых заездов. Что же касается конкретных схем, то описать даже сотую их часть просто не представляется возможным в данной статье, поэтому отсылаю вас к. Идея создания радиоуправляемой автомодели возникла давно. Но воплощению этой идеи в пластике и металле всё время мешали какие-то объективные причины. Во-первых, полное отсутствие опыта проектирования и постройки такой модели моё хобби-авиамоделизм, и устройство и работу некоторых узлов автомоделей, типы применяемых материалов, двигателей, аккумуляторов, подбор редуктора и т. Во-вторых, полное отсутствие литературы по этой тематике. В-третьих, отсутствие комплектующих двигателей, шестерен, подшипников малого диаметра и т. К удивлению, последняя проблема разрешилась быстро и просто. Я работаю на вычислительном центре, и ребята, знающие о моём увлечении моделизмом, как-то отдали мне несколько списанных печатающих механизмов от принтеров и накопителей на магнитных лентах. Из всех этих «железок» мне удалось подобрать несколько пар шестерен с разным передаточным числом, несколько валов из качественной стали для осей и маленькие подшипники. С литературой тоже было довольно просто: я пересмотрел все журналы «Моделист-конструктор» у себя и в библиотеке, и нашёл несколько интересных для меня статей. Захотелось построить что-то более серьёзное, пришлось опять разрабатывать чертежи. Из-за довольно-таки высокой сложности узлов фирменных моделей практически все детали литые и сложной конфигурации , трансмиссии, содержащей много деталей, малой прочности и износостойкости механизмов прошу учесть, что это моё субъективное мнение проектировать полноприводное и переднеприводное шасси я даже не пытался. Прототипом послужило шасси от модели Формула-1; модель изначально задумывалась для асфальта. Материалы — листовой стеклотекстолит, сталь, дюралюминий, капролактам, микропористая резина. Дифференциал сделал по описанию в «Моделисте-конструкторе», передняя подвеска — аналогично фирменной, но из стеклотекстолита, регулятор — самодельный, механический. В ходе эксплуатации возникли некоторые нюансы, которые меня не устраивали. Во-первых, полная незащищённость колёс от ударов соперников. Пришлось несколько раз менять рычаги передней подвески и пару раз ось заднего моста. Во-вторых, очень плотная компоновка механизмов под кузовом малого объёма, и, как следствие, затруднённое обслуживание и чистка узлов. В-третьих, был неудачно выбран материал для деталей дифференциала, и его работа меня не устраивала. С учётом вышеперечисленного, а так же накопленного опыта создания и эксплуатации подобных моделей был разработан несколько иной вариант шасси. Изменения коснулись главным образом типа шасси для закрытого кузова , компоновки узлов, некоторых деталей дифференциала, узла защиты рулевой машинки. Мне довольно затруднительно дать объективную оценку своему «произведению», но шасси меня устраивает. По сравнению с моделями TAMIYA шасси более скоростное правда, сравнение производилось визуально, сравнивались переднеприводное, полноприводное и моё шасси; модели были стандартного исполнения, без дополнительных опций. Детали и механизмы более простые, чем фирменные, в случае поломки легко восстанавливаемые или ремонтируемые.
В прошлый раз я остановился на том, что разблокировал четвертую ось управления и установил в пульт тучку кнопок, переключателей и светодиодов. Дальше дело было за схемой, паяльником и прошивкой. Как потом оказалось, кнопок и разъемов оказалось маловато, пришлось доустанавливать. Схема сделана на основе микроконтроллера Atmega8.
Пульт радиоуправления моделями своими руками / Хабр PS4-версия поэтому я ими и закончил. моей маме всегда нужно сделать что-то, когда.
Самодельная машинка из картона на радиоуправлении своими руками
Радиоуправляемые игрушки можно увидеть в руках каждого ребенка. Магазины переполнены разнообразными гаджетами и самым интересным на сегодняшний день будет собрать машинку на радиоуправлении своими руками. В этой инструкции я хочу показать вам, как сделать машинку на радиоуправлении своими руками. Вместо изготовления простой радиоуправляемой машинки, мы будем собирать картонную гоночную машинку F1. Картон общедоступен и делает возможным каждому собрать такую машинку прямо дома. Все материалы для изготовления машинки легкодоступны каждому, также в статье есть ссылки для покупки деталей онлайн. Видео — замечательная вещь, позволяющая глубоко вникнуть в особенности и понять процесс изготовления. Но я также рекомендую просмотреть все шаги инструкции для изучения дополнительных сведений и картинок. В местных магазинах купите: картон, деревянные палочки, зубочистки, плату для схемы Rx Tx и провода. Заметка: обязательно посмотрите видео , чтобы избежать ошибок.

Полезные советы. Как сделать пульт для радиоуправляемой машинки из ардуино. Схема радиоуправляемой машинки GR2 и пульта для нее GT2. Как сделать машинку на пульте управления.
С детства у меня была тяга к игрушкам.
Как сделать пульт управления для машинки? (Старый пульт управления от машинки потерялся)
Подарили машинку на ПУ, через год потерялся пульт (не пользовался машинкой долго) . Щас машинка работает, а пульта нет. Подскажите, как сделать к машинке пульт? (Или же где купить (Москва) ) на машинке написано: 27 MHZ. Ещё написано: Q. C. PASSED 02.Заранее спасибо за помощь.
Лучший ответ
Машинка с пультом на 27 Мгц стоит от 350 руб. Дома за 350 руб вы даже пульт не сделайте. Потому что их выпускают на потоке где всё как часы отлажено а у вас будет (скорее не будет) ручной работы. Сейчас схему то я вам дам а что дальше будете делать?
TX-2B это м-ма PT8A977BP (кодер). . .
Вообщем пульт можете купить в комплекте с аналогичной машинкой, но внимательней кроме 27 Мгц есть ещё на 35/40 Мгц. .

А приёмник там такой с микросхемой RX-2B она же PT8A978B (декодер) .

Нету в дешёвых в приёмнике кварца — он сверхрегенеративный и ОЧЁНЬ с широкой полосой!
Остальные ответы
надо смотреть схему. Какие детали, микросхемы. Там возможно кодированный сигнал. в этом случае как замок без ключа.
купи готовый. На 27 МГц. Или на 40, но тогда придётся купить и поменять приёмник в машинке. И ещё надо будет комплект кварцев на один канал, т. к. свой кварц ты вместе с приёмником посеял. Для этого разбери машинку и убедись, что приёмник стандартный и кварц сменный.
Bluetooth машинка своими руками

И вот наконец-то я решился сделать свою собственную машинку на управлении по Bluetooth! Для начала решил сделать всё максимально просто: 4 мотора, 4 колеса, ардуина, блютус модуль, ну и драйвер. Запитаем всё от паурбанка, на него и колёса закрепим. Для Андроид слепил приложеньку GyverJoy, простенький джойстик. Самая главная фишка в том, что в проекте используем FPV камеру и приёмник для смартфона, добавив разделение экрана от новой версии Андроид получим одновременное управление машинкой и вывод видео с камеры! Смотрите видос, проект просто бомбезный!
Похожие публикации:
- Волга 31105 сколько весит
- Малообслуживаемый аккумулятор что это такое
- Укажите чем является наименование 2060 720h л
- Хавал ф7 бак сколько литров



