Синхронные двигатели широко применяются в различных областях промышленности, так как они обладают рядом преимуществ перед другими типами двигателей. Однако одним из ограничений использования синхронных двигателей является их постоянная скорость вращения. Поэтому особую актуальность приобретает вопрос регулирования скорости вращения синхронного двигателя.
Существует несколько эффективных методов и принципов регулирования скорости вращения синхронного двигателя. Один из них — использование частотно-регулируемого привода (ЧРП). ЧРП позволяет изменять частоту переменного тока, поступающего на обмотки двигателя, и тем самым регулировать его скорость вращения. Этот метод обеспечивает высокую точность регулирования и широкий диапазон скоростей, однако требует использования специального оборудования и электронных устройств.
Еще одним способом регулирования скорости вращения синхронного двигателя является использование переменных напряжений на обмотках статора. При изменении напряжений на обмотках в соответствии с требуемой скоростью двигателя, его скорость вращения также изменяется. Этот метод, называемый методом векторного управления, обеспечивает высокую точность и быстродействие регулирования, но требует сложной математической обработки, поэтому его применение оправдано в случаях, когда необходима высокая точность и быстрый отклик системы.
Способы регулирования скорости вращения синхронного двигателя
Существует несколько способов регулирования скорости вращения синхронного двигателя. Один из наиболее распространенных методов — использование частотно-регулируемого преобразователя (ЧРП). ЧРП позволяет изменять частоту питающего напряжения и, как следствие, скорость вращения двигателя. В зависимости от возможностей конкретного преобразователя, можно достичь широкого диапазона скоростей.
Другим способом регулирования скорости вращения синхронного двигателя является использование изменяемых шпинделей или ременных передач. Эти устройства могут изменять передаточное отношение и, таким образом, регулировать скорость вращения двигателя. Однако этот метод имеет некоторые ограничения, связанные с механическими потерями и ограниченным диапазоном регулирования.
Также возможно использование метода векторного управления. Векторное управление позволяет регулировать не только скорость вращения, но и крутящий момент двигателя. Оно основано на управлении фазовыми токами и углами сдвига векторов тока и напряжения. Этот метод обеспечивает высокую точность регулирования и позволяет достичь высокого крутящего момента при низкой скорости вращения.
В общем, выбор способа регулирования скорости вращения синхронного двигателя зависит от требований конкретного приложения. Каждый из методов имеет свои преимущества и ограничения, и выбор должен быть основан на анализе этих факторов и учете конкретных условий эксплуатации.
Как регулируется скорость вращения ротора асинхронных электродвигателей.
Регулирование скорости синхронных двигателей

После вхождения синхронного двигателя в синхронизм его скорость при изменениях момента нагрузки на валу до некоторого максимального значенияостается постоянной и равной синхронной скорости

Так как изменение числа пар полюсов у серийно выпускаемых двигателей не применяется, то частотное регулирование является практически единственным способом регулирования угловой скорости синхронных двигателей. Оно характеризуется в основном такими же показателями, что и частотное регулирование скорости асинхронных двигателей с короткозамкнутым ротором. Это регулирование плавное, двухзонное. Диапазон регулирования вверх от номинальной синхронной скорости ограничивается механической прочностью ротора, его балансировкой и качеством подшипников. Диапазон регулирования вниз от номинальной синхронной скорости может достигать значений
у серийно выпускаемых двигателей не применяется, то частотное регулирование является практически единственным способом регулирования угловой скорости синхронных двигателей. Оно характеризуется в основном такими же показателями, что и частотное регулирование скорости асинхронных двигателей с короткозамкнутым ротором. Это регулирование плавное, двухзонное. Диапазон регулирования вверх от номинальной синхронной скорости ограничивается механической прочностью ротора, его балансировкой и качеством подшипников. Диапазон регулирования вниз от номинальной синхронной скорости может достигать значений  и более с учетом абсолютной жесткости механических характеристик двигателя и обеспечения синусоидальности напряжения питания. Стабильность скорости высокая. Допустимая нагрузка при постоянном возбуждении и независимой вентиляции соответствует номинальному моменту.
и более с учетом абсолютной жесткости механических характеристик двигателя и обеспечения синусоидальности напряжения питания. Стабильность скорости высокая. Допустимая нагрузка при постоянном возбуждении и независимой вентиляции соответствует номинальному моменту.
Использование полупроводниковых преобразователей частоты открывает большие возможности в отношении формирования требуемых статических и переходных процессов частотно-регулируемых синхронных электроприводов.
В отличие от асинхронного короткозамкнутого двигателя, при частотном регулировании скорости синхронный двигатель обладает гремя каналами управления моментом: изменением тока возбуждения  , изменением напряжения обмоток статора
, изменением напряжения обмоток статора  и изменением частоты
и изменением частоты  напряжения обмоток статора.
напряжения обмоток статора.
Для явнополюсного синхронного двигателя может быть получено уравнение электромагнитного момен та, вывод которого дан в [20]:

(5.77)
Индекс j в уравнении (5.77) показывает изменение соответствующего параметра.
Пренебрегая второй составляющей электромагнитного момента в выражении (5.77), получим

(5.78)
где А – постоянный коэффициент.
Если принять, что при частотном регулировании скорости синхронного двигателя запас устойчивости должен оставаться постоянным, то необходимо выполнение условия


(5.79)
где  – угол поворота ротора синхронного двигателя при совместном изменении момента сопротивления
– угол поворота ротора синхронного двигателя при совместном изменении момента сопротивления , частоты напряжения обмоток статора
, частоты напряжения обмоток статора , напряжения обмоток статора
, напряжения обмоток статора , потока возбуждения
, потока возбуждения

Решим (5.78) относительно, получим:

(5.80)

Подставим (5.80) в (5.79): откуда

(5.81)
Из выполнения условия (5.81) вытекают следующие законы частотного регулирования скорости синхронного двигателя:
- •

 . Регулирование скорости осуществляется при постоянной мощности. При данном способе регулирования при сниженных угловых скоростях синхронный двигатель обладает значительным максимальным моментом. Однако увеличение максимального момента при сниженных угловых скоростях сопровождается увеличением тока статора вследствие уменьшения реактивных сопротивлений машины. Способ регулирования может применяться при регулировании скорости вверх от номинальной;
. Регулирование скорости осуществляется при постоянной мощности. При данном способе регулирования при сниженных угловых скоростях синхронный двигатель обладает значительным максимальным моментом. Однако увеличение максимального момента при сниженных угловых скоростях сопровождается увеличением тока статора вследствие уменьшения реактивных сопротивлений машины. Способ регулирования может применяться при регулировании скорости вверх от номинальной; - •
 . Регулирование скорости производится при постоянном моменте. Закон регулирования применяется при независящей от угловой скорости механической характеристике производственного механизма, то есть при;
. Регулирование скорости производится при постоянном моменте. Закон регулирования применяется при независящей от угловой скорости механической характеристике производственного механизма, то есть при; - •
 Регулирование скорости производится при постоянной мощности () вниз от номинальной скорости;
Регулирование скорости производится при постоянной мощности () вниз от номинальной скорости; - •
 Регулирование скорости производится при вентиляторной нагрузке, то есть при
Регулирование скорости производится при вентиляторной нагрузке, то есть при
 . Однако увеличение максимального момента при сниженных угловых скоростях сопровождается увеличением тока статора вследствие уменьшения реактивных сопротивлений машины. Способ регулирования может применяться при регулировании скорости вверх от номинальной
. Однако увеличение максимального момента при сниженных угловых скоростях сопровождается увеличением тока статора вследствие уменьшения реактивных сопротивлений машины. Способ регулирования может применяться при регулировании скорости вверх от номинальной ;
; ;
; ) вниз от номинальной скорости
) вниз от номинальной скорости ;
;

Механические характеристики производственных механизмов и электроприводов «преобразователь частоты-синхронный двигатель» для законов регулирования классаприведены на рис. 5.56.

Рис. 5.56. Механические характеристики производственных механизмов и электроприводов «преобразователь частоты-синхронный двигатель»
Рассмотренные законы управления при частотном регулировании скорости синхронного двигателя справедливы только в первом приближении, особенно для явнополюсного синхронного двигателя, так как неучет реактивного электромагнитного момента приводит к значительным (до 20 %) погрешностям механических свойств двигателя.

Синхронный двигатель обладает очень важным свойством – при подаче на статорные обмотки постоянного напряжения () он создаст тормозной момент при неподвижном роторе, обеспечивая механическую фиксацию ротора в заданном положении.
Регулирование скорости для приводов с синхронными двигателями
Очевидным преимуществом перед асинхронным двигателем, питаемым от частотного преобразователя, является то, что скорость синхронного двигателя точно определяется частотой, а асинхронный двигатель всегда должен работать со скольжением. Точного источника частоты достаточно для точного управления скоростью синхронного двигателя, в то время как обратная связь по скорости необходима для достижения точности асинхронным двигателем.

На практике работа синхронных двигателей с инверторным питанием без обратной связи не так широко распространена, как можно было бы ожидать, хотя она обычно используется в многодвигательных приводах. Тем не менее, замкнутый контур или самосинхронная работа быстро набирают обороты и уже хорошо зарекомендовали себя.
С одной стороны, вместо приводов постоянного тока используются большие синхронные двигатели с возбужденным ротором, особенно там, где требуются высокие скорости или когда двигатель должен работать в опасной среде (например, в большом газовом компрессоре).
На другом конце шкалы находятся небольшие синхронные двигатели с постоянными магнитами, используемые в бесщеточных приводах постоянного тока.
Приводы синхронных двигателей с преобразователем, питаемым в разомкнутом контуре
Этот простой метод подходит для установок с несколькими двигателями, где все двигатели должны работать с одинаковой скоростью.
Отдельные двигатели дороже, чем эквивалентные асинхронные двигатели массового производства, но это компенсируется тем фактом, что не требуется обратная связь по скорости, и все двигатели могут питаться от одного инвертора (частотного преобразователя), как показано на рис. 1.
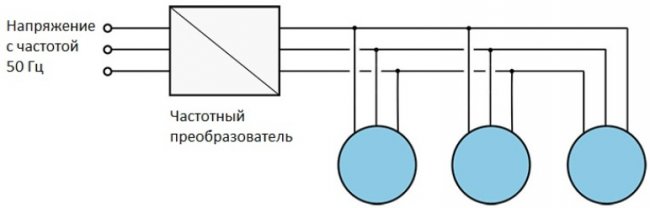
Рис. 1. Работа группы из нескольких синхронных двигателей с питанием от одного частотного преобразователя в разомкнутом контуре
Отношение напряжения к частоте инвертора обычно поддерживается постоянным, чтобы двигатели работали с полным потоком на всех скоростях и, следовательно, имели возможность «постоянного крутящего момента».
Если необходима длительная работа на малых скоростях, может потребоваться улучшение охлаждения двигателей.
Скорость точно определяется частотой привода, но изменения скорости (в том числе запуск из состояния покоя) должны выполняться медленно.
При работе группы из нескольких синхронных двигателей с питанием от одного частотного преобразователя в разомкнутом контуре иногда может возникать проблема, которая заключается в том, что скорость двигателя демонстрирует явные спонтанные колебания.
Частота питания может быть абсолютно постоянной, но частота вращения ротора колеблется вокруг ожидаемого (синхронного) значения, иногда с заметной амплитудой и обычно с низкой частотой, скажем, 1 Гц.
Причина такого нестабильного поведения заключается в том, что двигатель и нагрузка образуют систему как минимум четвертого порядка, и поэтому она может быть очень плохо демпфированной или даже нестабильной при определенных сочетаниях параметров системы.
Факторами, влияющими на стабильность, являются напряжение на клеммах, частота питания, постоянные времени двигателя, инерция и демпфирование нагрузки.
Неустойчивое поведение в собственном смысле слова (т. е. когда колебания неограниченно нарастают) встречается редко, но ограниченная неустойчивость не редкость, особенно на скоростях значительно ниже базовых 50 Гц и в условиях легкой нагрузки.
Очень сложно точно предсказать, когда может произойти нестабильное поведение, и необходимо принять меры против него. Поэтому некоторые преобразователи содержат схемы, которые обнаруживают любую тенденцию к колебаниям тока и модулируют напряжение и частоту для подавления нежелательных колебаний.

Рис. 2. Синхронный двигатель с постоянными магнитами Wolong Electric Group демонстрируется на выставке в городе Ханчжоу в Китае
Самосинхронная (замкнутая) работа
В разомкнутой схеме частота питания двигателя независимо регулируется частотным преобразователем, который не может точно определить, правильно ли ротор заблокирован вращающимся полем, создаваемым статором, и если тяговый момент превышен, двигатель просто останавливается.
Однако в самосинхронном режиме выходная частота инвертора определяется скоростью вращения ротора. В частности, моменты включения и выключения обмотки статора коммутационными устройствами определяются зависимыми от положения ротора сигналами, получаемыми от датчика положения ротора, установленного на валу ротора.
Таким образом, токи статора всегда включаются в нужное время для создания желаемого крутящего момента на роторе, потому что инвертор знает, где находится ротор в любой момент времени.
Использование сигналов обратной связи по положению ротора для управления инвертором объясняет приведенное выше описание «замкнутого контура».
Если ротор замедляется (например, из-за увеличения нагрузки), частота питания статора автоматически снижается, так что ротор остается синхронизированным с вращающимся полем, и поэтому двигатель не может «вырваться», как это происходит в режиме разомкнутого контура.
Различие между работой с обратной связью и без обратной связи может помочь прояснить аналогию с двигателем внутреннего сгорания.
Двигатель всегда работает как замкнутая система в том смысле, что открытие и закрытие впускных и выпускных клапанов автоматически синхронизируется с положением поршней с помощью распределительного вала и зубчатого ремня.
В самосинхронной машине это похоже на то, что переключающие устройства в инверторе включают и выключают ток в зависимости от положения ротора.
Напротив, работа двигателя в разомкнутом контуре означала бы, что мы сняли ремень ГРМ и решили управлять клапанами с отдельным приводом распределительного вала, и в этом случае должно быть ясно, что двигатель сможет производить мощность только на одной скорости при что движение поршней вверх и вниз в точности соответствует открытию и закрытию клапанов.
Оказывается, общие рабочие характеристики самосинхронного двигателя переменного тока очень похожи на характеристики обычного двигателя постоянного тока.
Это действительно неудивительно, если мы понимаем, что в двигателе постоянного тока механический коммутатор меняет направление тока в каждой (вращающейся) обмотке якоря в соответствующей точке, так что, независимо от скорости, ток под каждым (неподвижным) полюсом поля равен всегда в правильном направлении, чтобы создать требуемый крутящий момент.
В самосинхронном двигателе роли статора и ротора меняются местами по сравнению с двигателем постоянного тока.
Поле вращается, а «якорная» обмотка (состоящая из трех отдельных групп катушек или фаз) неподвижна.
Время и направление тока в каждой фазе контролируются переключением инвертора, которое, в свою очередь, определяется датчиком положения ротора. Поэтому, независимо от скорости, крутящий момент всегда в правильном направлении.
Комбинация датчика положения ротора и инвертора выполняет практически ту же функцию, что и коммутатор в обычном двигателе постоянного тока.
Конечно, обычно инвертор должен переключать только три обмотки по сравнению с гораздо большим количеством катушек и сегментов коммутатора, которые должны переключать щетки в двигателе постоянного тока, но в остальном сравнение применимо.
Неудивительно, что комбинацию датчика положения и инвертора иногда называют «электронным коммутатором», а общее сходство в поведении дает начало термину «двигатель с электронной коммутацией» (ECM) или «бесщеточный двигатель постоянного тока» (BLDC) для обозначения самосинхронных электрических машин.
Эксплуатационные характеристики и управление
Если входное напряжение постоянного тока инвертора постоянно и двигатель запускается из состояния покоя, ток через двигатель сначала будет большим, но будет уменьшаться со скоростью до тех пор, пока кинетическая электромагнитная сила, создаваемая внутри двигателя, почти не сравняется с приложенным напряжением.
По мере увеличения нагрузки на вал скорость начинает уменьшаться, электромагнитная движущая сила уменьшается, а ток увеличивается до тех пор, пока не будет достигнуто новое равновесие, при котором дополнительный крутящий момент двигателя равен крутящему моменту нагрузки.
Это поведение аналогично обычному двигателю постоянного тока, где скорость холостого хода зависит от приложенного напряжения якоря.
Таким образом, скоростью самосинхронного двигателя можно управлять, контролируя напряжение в звене постоянного тока до инвертора.
Общее сходство с приводом постоянного тока намеренно подчеркнуто на рис. 3.
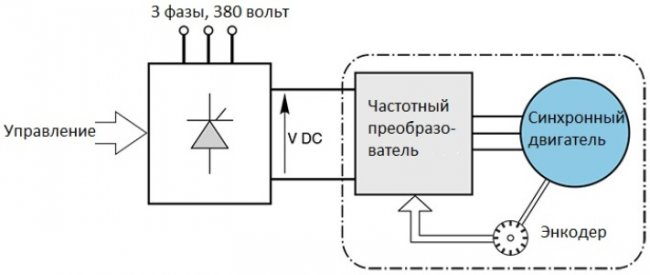
Рис. 3. Самодействующая система синхронного двигателя с инвертором. Для больших размеров такое устройство иногда называют синхронным приводом. Для меньших размеров, как бесщеточный привод с двигателем постоянного тока.
Штриховая линия, ограничивающая двигатель переменного тока вместе с датчиком положения ротора и инвертором, по существу заменяет обычный двигатель постоянного тока.
Однако отметим, что тахометр не является необходимым для регулирования скорости с обратной связью, поскольку сигнал обратной связи по скорости может быть получен из частоты сигнала положения ротора. И, как и в случае с приводом постоянного тока, можно использовать регулировку тока, а не регулировку напряжения, если необходимо контролировать выходной крутящий момент, а не число оборотов в минуту.
Если привод питается от полностью управляемого привода, возможна полноценная четырехквадрантная работа. С точки зрения затрат самосинхронная система кажется привлекательной, если совокупная стоимость частотного преобразователя и синхронного двигателя меньше стоимости эквивалентного двигателя постоянного тока.
Когда такие схемы были впервые представлены в 1970-х годах, они были рентабельны только при очень больших размерах (скажем, выше 1 МВт), но точка безубыточности для двигателей с возбуждением падает, и приводы с номинальной мощностью в сотни кВт теперь очень распространены.
Поскольку стоимость преобразователей упала, приводы меньшей мощности, использующие двигатели с постоянными магнитами, стали привлекательными, особенно там, где требуются очень высокие скорости и где обычный коллекторный двигатель постоянного тока не подходит из-за ограничений коммутатора.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Ранее на эту тему: Электропривод
15. Регулирование частоты вращения синхронных двигателей
Частота вращения синхронного двигателя n2 равна частоте вращающегося магнитного поля n1 = 60f1/р, следовательно, ее можно регулировать путем изменения частоты питающего напряжения или числа полюсов 2р. Регулировать частоту вращения путем изменения числа полюсов в синхронном двигателе нецелесообразно, так как, в отличие от асинхронного, здесь требуется изменять число полюсов как на статоре, так и на роторе, что приводит к значительному усложнению конструкции ротора. Поэтому практически используют лишь изменение частоты питающего напряжения.
К синхронному двигателю применимы все основные положения теории частотного регулирования асинхронного двигателя, в том числе необходимость одновременного изменения как частоты, так и питающего напряжения. Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при очень малых мощностях, когда нагрузочные моменты невелики, а инерция приводного механизма мала (см. гл. 2). При больших мощностях такие условия имеют место только в некоторых типах электроприводов, например в электроприводах вентиляторов.
Для синхронных двигателей, применяемых в электроприводах с большим моментом инерции приводного механизма, необходимо очень плавно изменять частоту питающего напряжения, чтобы двигатель не выпал из синхронизма. Особенно сложным является пуск в ход двигателя, когда начальная частота должна составлять доли герца, а затем постепенно повышаться до максимального значения. Для таких электроприводов наиболее пригодным является метод частотного регулирования с самосинхронизацией, при котором двигатель в принципе не может выпасть из синхронизма. Последнее достигается тем, что управление преобразователем частоты осуществляется от системы датчиков положения ротора, вследствие чего напряжение подается на каждую фазу двигателя при углах нагрузки θ, меньших 90°. При таком регулировании автоматически обеспечиваются условия устойчивой работы двигателя и его перегрузочная способность определяется только перегрузочной способностью преобразователя частоты.
Синхронные двигатели, регулируемые путем изменения частоты с самосинхронизацией, называют вентильными двигателями; иногда их называют бесколлекторными двигателями постоянного тока. Однако первое название является более правильным, так как такие двигатели могут получать питание от сети как постоянного, так и переменного тока.
Частотное регулирование без самосинхронизации. Электромагнитный момент синхронного двигателя может быть выражен в виде
При частотном регулировании обычно стремятся получить режим работы двигателя с cosφ = 1, когда в обмотке якоря имеют место минимальные потери энергии. Для этого ток якоря Iа должен поддерживаться постоянным и минимальным:
Из (1.47) следует, что при неизменных нагрузочном моменте (Мн = М = const) и потоке возбуждения (Фв = const), т. е. токе
возбуждения (Iв = const), угол θ в процессе регулирования частоты не должен изменяться. Однако при изменении частоты f1 изменяются э. д. с. Е0, угловая скорость ротора ω1 и индуктивное сопротивление хсн (или сопротивления xd и xq при явнополюсном роторе), т. е.
Поэтому при частотах питающего напряжения f1 отличных от номинальной частоты f1ном, формула электромагнитного момента [см. (1.35)] принимает вид:
где с = mE0 номf1 ном/(ω1номхсн ном) —постоянная.
Из (1.49) следует, что при неизменных значениях нагрузочного момента Мн = М и тока якоря 1а = [а мин необходимо выдерживать условие
т. е. изменять напряжение Uп, подаваемое к электродвигателю от преобразователя частоты, пропорционально изменению частоты f1. При соблюдении условия (1.50) все стороны треугольника ОАВ (рис. 1.50, а) будут изменяться пропорционально частоте, а угол θ останется неизменным. При изменении нагрузки необходимо в соответствии с (1.46) изменять поток возбуждения Фв, т. е. ток возбуждения Iв.
Вентильный двигатель. При питании вентильного двигателя от сети постоянного тока в преобразователе частоты должны применяться тиристоры с узлами принудительной коммутации. В двигателях малой мощности допустимо применение транзисторов. На рис. 1.51, а показана принципиальная схема питания вентильного двигателя от тиристорного преобразователя частоты.
Преобразователь частоты представляет собой автономный инвертор напряжения, который подключен к источнику постоянного тока и формирует трехфазное напряжение изменяющейся частоты; это напряжение подается на фазы А, В и С обмотки якоря двигателя. К каждой фазе может быть подведено положительное (тиристорами Т1, Т2 и Т3) и отрицательное (тиристорами Т4, Т5 и Т6) напряжения.
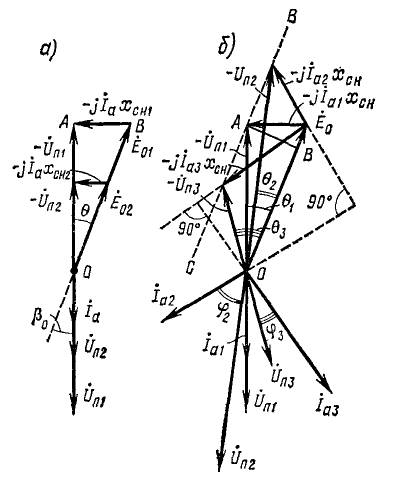
Рис. 1.50 — Векторные диаграммы синхронного двигателя,
питаемого от преобразователя частоты при постоянном нагрузочном моменте:
а —при постоянном угле θ и cosφ=l; б —при изменении угла θ
Если вначале пропускать ток через фазы А и В (открыты тиристоры Т1 и Т5), затем через фазы В и С (открыты тиристоры Т2 и Т6), далее через фазы С и А (открыты тиристоры Т3 и Т4) и т. д. в указанной последовательности, то в машине создается вращающееся магнитное поле. При изменении частоты переключения тиристоров изменяется частота напряжения, подаваемого на фазы обмотки якоря, а следовательно, и частота вращения ротора. Для замыкания реактивной составляющей тока якоря в преобразователе имеются диоды Д1—Д6, включенные параллельно тиристорам, но и в обратном направлении.
Коммутация тока в тиристорном преобразователе (переключение тока с одной фазы на другую) требует применения специальных коммутирующих узлов, так как тиристор является не полностью управляемым прибором. Для закрытия тиристора, включенного в цепь постоянного тока, необходимо кратковременно подать на него обратное напряжение определенной величины.
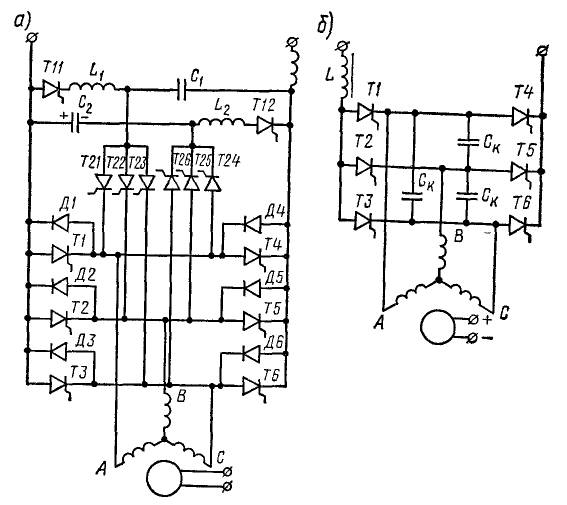
Рис. 1.51 — Принципиальные схемы питания вентильного двигателя
от тиристорного преобразователя частоты с инвертором напряжения (а)
и инвертором тока (б)
В рассматриваемом преобразователе применены два таких узла принудительной (или искусственной) коммутации — по одному для всех тиристоров, присоединяемых соответственно к положительному и отрицательному полюсам источника постоянного тока. Каждый узел состоит из контура L-C и вспомогательных тиристоров.
Закрытие тиристоров T1, Т2 и ТЗ, присоединенных к положительному полюсу, производится контуром L1-C1. При открытии вспомогательного тиристора Т11 конденсатор С1 заряжается через индуктивность L1 до величины двойного напряжения сети и запрает тиристор Т11. Затем открываются вспомогательные тиристоры Т21, Т22 или Т23 и подают на тиристоры T1, T2 или Т3 обратное (положительное) напряжение. При этом соответствующий тиристор запирается, а конденсатор С1 разряжается через нагрузку.
Аналогично запираются тиристоры Т4, Т5 и Т6. Вначале открывают вспомогательный тиристор Т12 и через индуктивность L2 заряжают конденсатор С2. Затем, открывая вспомогательные тиристоры Т24, Т25 или Т26, присоединяют аноды тиристоров Т4, Т5 или Т6 к отрицательной обкладке конденсатора С2.
Напряжение, подаваемое к якорю вентильного двигателя от преобразователя частоты, является, так же как и при частотном регулировании асинхронного двигателя, несинусоидальным. Поэтому, чтобы уменьшить вредные воздействия высших гармоник напряжения, тока и потока, двигатель необходимо снабдить мощной демпферной обмоткой с малыми активным и индуктивным сопротивлениями (см. 1.17). В этом случае высшие гармоники оказывают на синхронный двигатель сравнительно небольшое воздействие. При наличии такой обмотки режимы работы вентильного двигателя можно рассматривать с учетом только первых гармоник тока и напряжения.
Режим работы вентильного двигателя зависит не только от величины тока возбуждения и соотношения между напряжением и частотой, как в обычном синхронном двигателе, регулируемом путем изменения частоты. Большое значение имеют также момент подачи напряжения на фазу двигателя и свойства преобразователя частоты.
В преобразователе частоты, основанном на использовании инвертора напряжения (рис. 1.51, а), величина выходного напряжения почти не зависит от режима работы двигателя. Поэтому регулирование необходимо вести при постоянстве угла θ (см. рис. 1.50, а). Последнее можно осуществить, определяя с помощью какого-либо датчика положение оси полюсов ротора (а следовательно, и направление вектора Ė0) и регулируя подачу управляющих импульсов на тиристоры преобразователя так, чтобы напряжение Ùп подавалось на соответствующие фазы двигателя с некоторым углом опережения β0 ≈ θ (угол регулирования) по отношению к положению вектора Ė0 для данной фазы. Можно также определять ось результирующего магнитного потока и подавать питание на соответствующую фазу с требуемым углом β0. Оба эти метода имеют свои преимущества и недостатки, обусловленные в основном особенностями применяемых датчиков и управляющих устройств.
В рассматриваемой схеме питания вентильного двигателя угол регулирования β0 практически полностью определяет угол θ. Если приближенно положить β0 ≈ θ, то при постоянных значениях частоты питающего напряжения и тока возбуждения (т. е. ω1 и э. д. с. Е0) формула (1.35) принимает вид
Следовательно, при изменении угла регулирования β0 ≈ θ для поддержания неизменным момента М нужно регулировать величину подводимого к двигателю от преобразователя напряжения Uп.
На рис. 1.50, б показано несколько положений векторов Ùп,
Iа и —jİaxсн при Е0 = const и различных значениях угла опережения β0 ≈ θ преобразователя частоты. При угле опережения β01 ≈ θ1 векторы Ùп1, İа1 и –jIalxсн направлены так, что ток İа1 совпадает по фазе с напряжением Ùп1 и является минимальным; при уменьшении угла β0 до β02 = θ2 напряжение, подводимое к двигателю, необходимо увеличить до Uп2; при этом ток İа2 будет отставать от Ùп2 на угол φ2; при увеличении угла β0 до β03 = θ3 необходимо уменьшать напряжение, подводимое к двигателю до Uп3, при этом ток İа3 будет опережать Ùп3 на угол φ3. Так как величина Uпsinθ на векторной диаграмме (рис. 1.50, б) выражается отрезком АВ, то при изменении угла опережения конец вектора напряжения — Ùп перемещается по прямой ВАС, проходящей через точку А и параллельной вектору Ė0. Ток якоря Iа при таком регулировании может существенно увеличиться, а максимальный момент двигателя в режиме, когда ток İа отстает от напряжения Ùп преобразователя (например, в положениях İа2 и Ùп2), уменьшится.
В преобразователе частоты, основанном на использовании инвертора тока, большая индуктивность L в цепи постоянного тока (рис. 1.51, б) позволяет считать ток якоря Iа практически неизменным (ток Iа имеет прямоугольную форму). Вследствие этого угол опережения β0 определяет положение вектора тока İа на диаграмме двигателя относительно положения вектора э. д. с. Ė0.
Для того чтобы двигатель работал при соsφ = 1, вектор тока İа должен опережать вектор э. д. с. Ė0 на угол β0, который в зависимости от нагрузки составляет 30—60°. Пусковой момент вентильного двигателя максимален при β0 = 0, поэтому в электроприводах с тяжелыми условиями пуска сначала регулирование ведут при β0 = 0, а с ростом частоты вращения начинают задавать некоторый угол опережения.
При необходимости питания вентильного двигателя от сети трехфазного тока могут применяться преобразователи частоты с непосредственной связью, т. е. без промежуточного выпрямления (рис. 1.52, а). Преимуществом таких преобразователей является отсутствие узлов принудительной коммутации, так как тиристоры перестают проводить ток после изменения направления напряжения в соответствующей фазе. Однако достаточно хорошее приближение формы выходного напряжения к синусоиде и четкое прекращение тока (в необходимый момент) может быть получено только в том случае, если источник трехфазного тока имеет частоту, в два-три раза большую, чем выходная частота преобразователя (рис. 1.52, б).
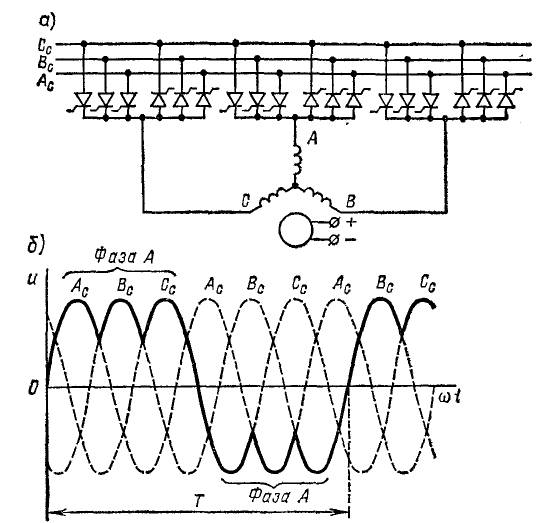
Рис. 1.52 — Принципиальная схема питания вентильного двигателя
от преобразователя частоты с непосредственной связью (а) и
форма кривой выходного напряжения преобразователя (б)
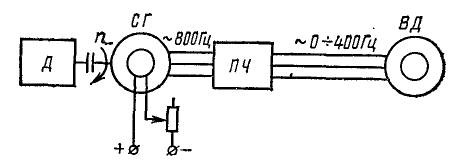
Рис. 1.53 — Схема электротрансмиссии автомобиля с вентильными двигателями
В качестве примера рассмотренного способа питания вентильного двигателя на рис. 1.53 приведена принципиальная схема электротрансмиссии мощного автомобиля. Дизель Д вращает вал трехфазного синхронного генератора СГ повышенной частоты (800 Гц) примерно с постоянной частотой. Напряжение генератора СГ, величина которого регулируется изменением тока возбуждения подается на тиристорный преобразователь частоты ПЧ, от которого пониженная частота подается к вентильным тяговым двигателям ВД, каждый из которых вращает ось соответствующего колеса. Частота тока на выходе преобразователя при этом регулируется в пределах от 0 до 400 Гц.
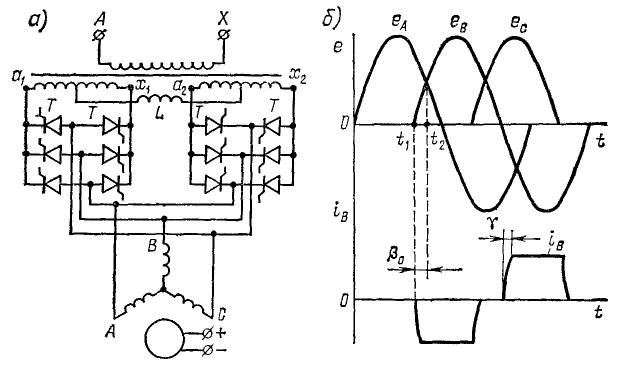
Рис 1.54 — Принципиальная схема питания вентильного двигателя
от однофазной сеги (а) и графики изменения э. д. с. и тока в фазе двигателя (б)
На рис 1.54, а приведена схема питания вентильного двигателя от однофазной сети, разработанная для мощных электровозов переменного тока. Однофазный трансформатор электровоза имеет две вторичные обмотки: а1 — х1 и а2 — х2, средние точки которых соединены между собой через дроссель L. К каждой вторичной обмотке подключены шесть тиристоров Т, которые позволяют питать обмотку якоря двигателя трехфазным током, создавая вращающееся магнитное поле. При малой частоте вращения, когда частота выходного напряжения (машинная частота) не превосходит 10 Гц коммутация тиристоров (их запирание) происходит под действием’напряжения сети. При повышенных частотах коммутация осуществляется за счет э.д.с, индуктируемых в фазах якоря двигателя, так как включение тиристора, питающего очередную фазу производится с опережением— в момент времени t1 (рис. 1.54, б). Иными словами, включение тиристора произойдет раньше, чем э д с в этой фазе приблизится к значению, при котором происходит естественная коммутация вентилей, включенных в соседние фазы (момент времени t2). Разность э.д.с. по контуру двух фаз, замкнутых накоротко включенными тиристорами одной полярности, обеспечивает закрытие тиристора, питающего ту фазу, в которой индуктируется большая э. д. с. Для нормального закрытия тиристоров практически приходится делать угол опережения β0 равным 30—60°, так как индуктивность фаз довольно велика и ток в тиристорах нарастает и спадает плавно.
Использование рассмотренного способа коммутации тиристоров вентильного двигателя дает возможность обеспечить работу при частоте, равной частоте питающей сети или даже большей ее (при так называемых «сверхсинхронных частотах вращения»). Для того чтобы при повышенных частотах вращения форма кривой тока в фазах двигателя была близка к прямоугольной, между вторичными обмотками трансформатора включают мощный дроссель L, обтекаемый током одного направления. Недостатками рассмотренной схемы питания вентильного двигателя являются сложность системы управления и пониженный к. п. д. (из-за наличия большого дросселя).
Следует отметить, что все типы вентильных двигателей не обладают еще достаточно высокой надежностью из-за сложности преобразователей частоты и их схем управления, которые имеют большое количество вентилей и других элементов, весьма чувствительных к перегрузкам. Тем не менее вентильные двигатели, как и асинхронные двигатели с частотным регулированием, являются весьма перспективными и в будущем можно ожидать широкое применение их в электроприводе. В настоящее время происходит быстрое совершенствование мощных тиристоров, интегральных схем и других полупроводниковых приборов, которое позволит обеспечить надежную работу преобразователей частоты.



