ИНЕРЦИАЛЬНАЯ НАВИГАЦИЯ, метод измерения ускорения судна или летательного аппарата и определения его скорости, положения и расстояния, пройденного им от исходной точки, при помощи автономной системы. Системы инерциальной навигации (наведения) вырабатывают навигационную информацию и данные для управления на борту самолетов, ракет, космических аппаратов, морских судов и подлодок.
Также по теме:
Ускорение есть быстрота изменения скорости, а скорость – быстрота изменения положения. Измеряя ускорение движения, можно путем его интегрирования вычислять скорость. Интегрированием же скорости можно определять текущее местоположение (координаты) летательного аппарата или судна. Таким образом, система инерциальной навигации есть система счисления пути.
Ускорение является векторной величиной, которая имеет не только численное значение, но и направление. Следовательно, система датчиков, определяющая ускорение, должна измерять и его величину, и его направление. Акселерометр измеряет величину. Информацию о направлении дают гироскопы, обеспечивающие опорную систему координат для акселерометров.
Акселерометры, измеряя фактическое ускорение, скажем, летательного аппарата, в то же время реагируют на гравитационное поле. Для компенсации этого ускорения система инерциальной навигации вычитает из выходных данных акселерометров вычисленное значение g. Величина g вычисляется как функция местоположения (координат), в частности долготы и широты.
Итак, система инерциальной навигации измеряет кажущееся ускорение, в которое входит ускорение свободного падения. Затем она, дважды интегрируя эту величину, находит местоположение. И наконец, исходя из этого вычисленного местоположения, вычисляет величину g, которая вычитается из кажущегося ускорения. Такая система с обратной связью второго порядка (рис. 1) ведет себя, как генератор колебаний очень низкой частоты в двух ортогональных горизонтальных направлениях. Период колебаний на уровне моря равен 84 мин; они называются колебаниями Шулера по имени немецкого изобретателя М.Шулера, запатентовавшего в 1908 первый практически пригодный гирокомпас.
Варианты системы.
В прежних системах инерциальной навигации опорная система координат обеспечивалась установкой акселерометров и гироскопов на стабилизированной платформе в кардановом подвесе. Такой подвес изолировал платформу от поворотов летательного аппарата или судна. Это позволяло удерживать акселерометры в неизменной ориентации относительно Земли при движении объекта.
В современных системах инерциальной навигации применяются компьютеры, следящие за ориентацией акселерометров. Такие системы называются бесплатформенными. Выходные данные гироскопов поступают непосредственно на компьютер, который вычисляет мгновенное направление акселерометров в опорной системе координат и соответствующие корректирующие сигналы.
Управление и самонаведение ракет: в чем разница?
История
Инерциальные навигационные системы первоначально разрабатывались для ракет. Американский пионер ракетостроения Роберт Годдард экспериментировал с элементарными гироскопическими системами. Эти системы получили более широкое применение с появлением космических кораблей, управляемых ракет и коммерческих авиалайнеров.
Ранние немецкие системы наведения Второй мировой войны V2 объединяли два гироскопа и боковой акселерометр с простым аналоговым компьютером для регулировки азимута для ракеты в полете. Аналоговые компьютерные сигналы использовались для приведения в действие четырех графитовых рулей в выхлопе ракеты для управления полетом. Система Gn некоторые IMU включают гироскопический элемент (для поддержания абсолютного углового ориентира).
Угловые акселерометры измеряют, как корабль вращается в пространстве. Как правило, имеется по крайней мере один датчик для каждой из трех осей: тангажа (нос вверх и вниз), рыскания (нос влево и вправо) и крена (по часовой стрелке или против часовой стрелки из кабины).
Линейные акселерометры измеряют негравитационные ускорения транспортного средства. Поскольку он может перемещаться по трем осям (вверх и вниз, влево и вправо, вперед и назад), для каждой оси имеется линейный акселерометр.
Компьютер постоянно вычисляет текущее положение автомобиля. Во-первых, для каждой из шести степеней свободы (x,y,z и θx ,yy и zz) он интегрирует с течением времени ощущаемое ускорение вместе с оценкой силы тяжести для вычисления текущей скорости. Затем он интегрирует скорость для вычисления текущего положения.
Инерциальное наведение затруднительно без компьютеров. Желание использовать инерциальное наведение в ракете Minuteman и проекте Apollo привело к ранним попыткам уменьшения размера компьютеров.
В настоящее время инерциальные системы наведения обычно объединяются со спутниковыми навигационными системами посредством цифровой системы фильтрации. Инерциальная система обеспечивает получение краткосрочных данных, а спутниковая система исправляет накопленные ошибки инерциальной системы.
Инерциальная система наведения, которая будет работать вблизи поверхности земли, должна включать тюнинг Шулера таким образом, чтобы ее платформа продолжала указывать в сторону центра Земли, когда транспортное средство перемещается с места на место.
Как работает инерциальная система
В упрощенном виде работу ИНС можно представить по следующей схеме. В блок ввода начальной информации загружаются исходные данные для калибровки навигационной системы и ориентации инерционных датчиков. Затем эти данные попадают в блок измерений, вычислительный блок и блок времени, который синхронизируется с мировым временем. В ходе движения блок измерений регистрирует изменения параметров, на основе которых вычислительный блок определяет скорость и координаты объекта, после чего они передаются в систему управления.

Важнейшим параметром в работе ИНС является система отсчета. Она обеспечивает исходную ориентацию для начала навигации. Грубо говоря, система отсчета каждый раз подсказывает прибору, где право, где лево, где верх, а где низ, а также точку старта движения. В качестве системы отсчета могут выступать астрономические объекты, Земля или горизонт, также она может быть произвольной.
Несмотря на довольно высокую точность, инерциальные навигационные системы имеют и свои недостатки. Слабым местом ИНС являются ошибки в измерениях, которые накапливаются с течением времени в получаемой от приборов информации – так называемый дрейф. Так как навигационный компьютер суммирует каждое измерение, чтобы выяснить, как изменилось положение по сравнению с предыдущей оценкой, небольшая погрешность со временем растет, и общая оценка становится все более неточной. Для коррекции подобных ошибок инерциальные системы обычно дополняются GPS-датчиками.
Навигация из Раменского
В нашей стране первые устройства, основанные на инерциальной навигации, появились в 1960-е годы. Пионером в этом направлении выступило Раменское приборостроительное конструкторское бюро (РПКБ), в котором уже с 1958 года разрабатывались первые проекты ИНС для летательных аппаратов. В последующие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др.
Раменский приборостроительный завод (РПЗ), при котором когда-то было создано конструкторское бюро, также многие годы выпускает инерциальные навигационные системы. Оба предприятия входят в структуру «Концерна Радиоэлектронные технологии» Госкорпорации Ростех. Одной из основных серийных инерциальных навигационных систем, выпускаемых РПЗ, сегодня является система ИНС-2000 и ее модификации.

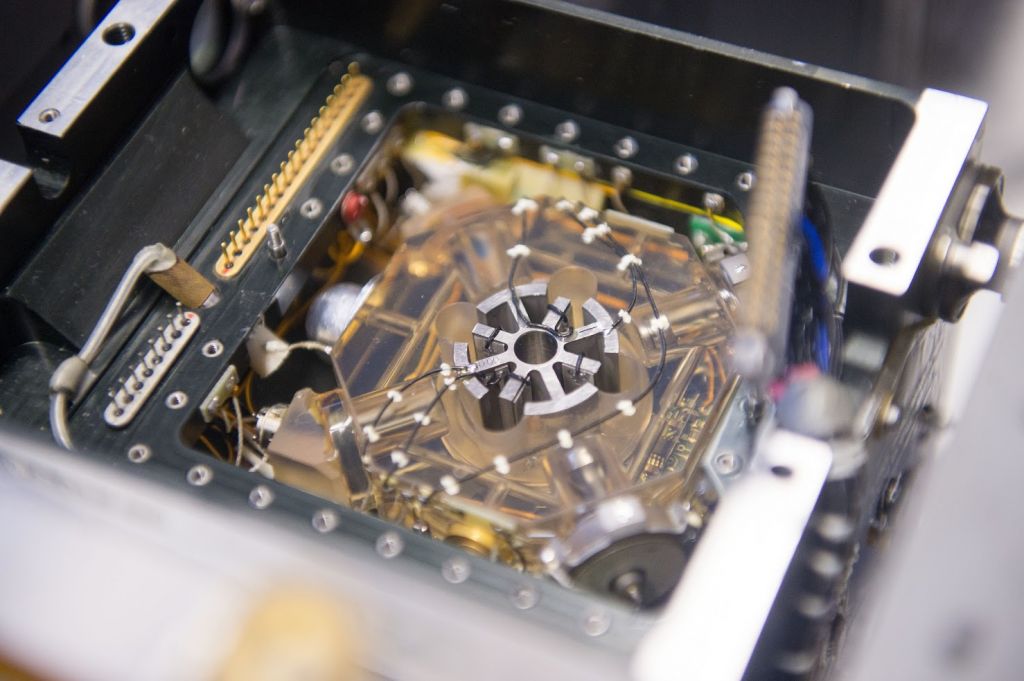
ИНС-2000 относится к платформенным системам с применением механических гироскопов. Она выполнена в виде моноблока, состоящего из гиростабилизированной платформы на базе динамически настраиваемых гироскопов, сервисной электроники, вычислителя и блока интерфейса. При необходимости система может комплектоваться магнитометром и интегрироваться со спутниковой навигацией.
ИНС-2000 отличается высокой точностью работы. При автономном использовании погрешность системы составляет не более 3.7 км за час полета, а при работе со встроенным блоком спутниковой коррекции не превышает 40 м за час.
Раменским приборостроительным заводом создано пять модификаций системы, которые позволяют использовать разработку практически для любых летательных аппаратов. Изделия отличаются функционально-программным обеспечением — каждое из них адаптировано под конкретные комплексы бортового оборудования, учитывает характеристики определенного типа самолетов и вертолетов.
Сегодня ИНС-2000 используется в качестве бортового датчика навигационной информации в большинстве отечественных вертолетов и самолетов. В 2016 году на раменском предприятии была проведена модернизация изделия по замене импортной элементной базы на отечественную в рамках импортозамещения. В феврале 2022 года Раменский приборостроительный завод выпустил тысячный блок инерциальной навигационной системы ИНС-2000.
Ишлинский А.Ю. Инерциальное управление баллистическими ракетами
- формат djvu
- размер 2.07 МБ
- добавлен 08 марта 2011 г.
Стр. 143, издательство «Наука», Москва, 1968 г. В монографии излагаются некоторые математические основы автономного управления полетом баллистических ракет без использования внешней информации (радиосигналов, излучения звезд и др. ). Автономное управление осуществляется приборами, расположенными на борту ракеты, действие которых основано на использовании инерции. Интегрируя по времени мгновенные значения ускорений, приборы образуют сигнал своевре.
Лаврухин Г.Н., Попович К.Ф. Аэрогазодинамика реактивных сопел. Том 2. Обтекание донных уступов потоком газа
- формат djvu
- размер 5.16 МБ
- добавлен 16 января 2012 г.
Монография. Москва: Физмалит, 2009. — 312 с. Книга представляет собой том 2 монографии «Аэрогазодинамика реактивных сопел». Она посвящена решению такой важной проблемы, как управление отрывными течениями в доменных областях с целью снижения донного сопротивления. Сделано обобщение обширного количества, в основном, экспериментальных данных, полученных за последние полвека отечественными и зарубежными авторами. Подробно рассмотрены основные встреч.
Волоконно-оптический гироскоп
(рис. 4) действует по принципу интерферометра Саньяка. Свет в нем направляется по замкнутому пути с помощью оптического волновода. Для увеличения длины оптического пути и повышения чувствительности гироскопа оптическое волокно свернуто в спираль. В волоконно-оптическом гироскопе используется внешний лазерный источник света. И здесь обратное рассеяние остается серьезной проблемой.
Поскольку системы инерциальной навигации автономны, на их работе не сказываются погодные условия. Они не поддаются радиоэлектронному подавлению и обеспечивают скрытность (не генерируют электромагнитного излучения, выдающего присутствие летательного аппарата).
Одним из недостатков систем инерциальной навигации является то, что их необходимо настраивать (выставлять) не только по скорости и местоположению, но и по пространственному положению (ориентации относительно заданной базы, например горизонта). Пространственное положение можно задать, пользуясь акселерометрами для определения направления вертикали и гироскопами для определения вращения Земли. Этими векторами определяются оси опорной системы координат (но только не в том случае, когда объект находится на Южном или Северном полюсе; в этом случае направление вертикали коллинеарно оси земного вращения и система не может определить азимут). Процесс выставки занимает несколько минут или более. Общее правило таково, что чем меньше время выставки, тем ниже чувствительность и точность системы.
Большим недостатком системы инерциальной навигации является то, что ее ошибка со временем накапливается. Это обусловлено интегрирующим действием самой системы. Скорость вычисляется интегрированием ускорения, и постоянная ошибка ускорения преобразуется в непрерывно нарастающую ошибку скорости. Благодаря обратной связи по ускорению свободного падения нарастание ошибки происходит лишь в пределах одного периода колебаний Шулера (84 мин). Однако для баллистических ракет и это много. Кроме того, из-за многочисленных малых погрешностей измерения амплитуда этих колебаний со временем увеличивается. В связи с ошибками гироскопа возникают ошибки направления при измерении кажущегося ускорения и ускорения свободного падения, что тоже приводит к нарастанию дополнительных ошибок.
Вспомогательные навигационные средства.
Если накопленная ошибка становится слишком большой, ее можно корректировать с помощью внешних вспомогательных средств. Конечно, тогда система становится неавтономной. К внешним навигационным средствам относятся доплеровские радиолокационные станции, системы астроориентации, радиолокационные средства определения местоположения, навигационные спутники и различные электронные системы наземного базирования («Такан», «Лоран», «Омега»).
Для оптимального использования данных, поступающих от внешних вспомогательных средств, нужно, чтобы тщательно учитывались характеристики и погрешности этих и бортовых навигационных средств. Оптимальное объединение данных разных источников обеспечивает «обобщенный фильтр Калмана», названный по имени американского математика венгерского происхождения Ф.Калмана, опубликовавшего в 1961 свой метод фильтрации. Эта вычислительная процедура представляет собой алгоритм, допускающий компьютерную реализацию. Он применяется почти во всех инерциальных навигационных системах.
См. также АЭРОНАВИГАЦИЯ; АВИАЦИОННЫЕ БОРТОВЫЕ ПРИБОРЫ; ГИРОСКОП
Также по теме:
Литература:
Андреев В.Д. Теория инерциальной навигации. М., 1967
Ишлинский А.Ю. Ориентация, гироскопы и инерциальная навигация. М., 1976
Климов Д.М. Инерциальная навигация на море. М., 1984
Кавинов И.Ф. Инерциальная навигация в околоземном пространстве. М., 1988
Преимущества использования инерциальной системы наведения
1. Высокая точность и надежность: Инерциальная система наведения основана на принципах инерции, что позволяет получать высокоточную информацию о положении и движении объекта. Благодаря этому, система обеспечивает высокую точность наведения и отслеживания цели, не завися от внешних факторов или помех.
2. Быстрая реакция: Инерциальная система наведения работает самостоятельно и не требует постоянной связи с внешними источниками информации. Благодаря этому, она обеспечивает мгновенную реакцию и моментальное наведение на цель. Это особенно важно в ситуациях, требующих быстрого реагирования и высокой скорости работы.
3. Устойчивость к помехам: Инерциальная система наведения не зависит от внешних факторов, таких как электромагнитные помехи или преграды в окружающей среде. Она работает на основе внутренних инерциальных датчиков, что обеспечивает стабильность и надежность работы системы даже в сложных условиях.
4. Широкий спектр применения: Инерциальные системы наведения используются в различных областях, включая авиацию, космическую технику, военное дело, морскую и другие отрасли. Они эффективно применяются для наведения и управления ракетами, беспилотными летательными аппаратами, спутниками и другими объектами, требующими точной навигации и ориентации в пространстве.
5. Малые размеры и вес: Инерциальные системы наведения могут быть компактными и легкими, что позволяет устанавливать их на мобильных или ограниченных по размеру платформах. Это особенно важно для использования в малых носителях, а также в случаях, когда важна экономия пространства и массы.
6. Независимость от внешних систем: Инерциальная система наведения не требует поддержки или связи с другими системами и источниками информации. Это делает ее независимой и надежной в работе, а также возможным использование в условиях, где доступ к внешним источникам или коммуникационной сети ограничен или невозможен.
7. Использование в экстремальных условиях: Инерциальные системы наведения могут быть использованы в экстремальных условиях, включая высокие перегрузки, вибрации и экстремальные температуры. Они демонстрируют высокую устойчивость к таким условиям и способны обеспечивать стабильную и надежную работу в любых экстремальных ситуациях.
Таким образом, использование инерциальной системы наведения предоставляет ряд преимуществ, включая высокую точность, быструю реакцию, устойчивость к помехам, широкий спектр применения, малые размеры и вес, независимость от внешних систем, а также возможность использования в экстремальных условиях.
Как работает инерциальная навигационная система
Чтобы транспортные средства, включая летательные аппараты, надводные и подводные корабли, а также космические аппараты и беспилотники, могли понимать свое положение и ориентацию в пространстве, можно использовать либо зависимые от спутниковой связи GPS-навигаторы, либо не требующие внешних источников данные инерциальные навигационные системы (ИНС).
В состав ИНС входят измерительное оборудование, включающее в себя гироскопы и акселерометры, а также обрабатывающий информацию от них навигационный компьютер. Гироскопы (механические или лазерные) устанавливают углы наклона объекта относительно трех основных осей (тангаж, рысканье и крен), а акселерометры фиксируют линейное ускорение.
Если ИНС платформенная, то измерительное оборудование располагается на гиростабилизированной платформе, вращаеющейся независимо от ИНС, а в бесплатформенной ИНС акселерометры и гироскопы жестко связаны с корпусом прибора и функции платформы моделируются математически вычислительной системой.

Как работает инерциальная навигационная система
«Система отсчета каждый раз подсказывает прибору, где право, где лево, где верх, а где низ, а также точку старта движения. В качестве системы отсчета могут выступать астрономические объекты, Земля или горизонт, также она может быть произвольной, но система отсчета обязательна для ИНС.
В блок ввода начальной информации ИНС загружаются исходные данные для калибровки навигационной системы и ориентации инерционных датчиков. Затем эти данные попадают в блок измерений, вычислительный блок и блок времени, который синхронизируется с мировым временем. В ходе движения блок измерений регистрирует изменения параметров, на основе которых вычислительный блок определяет скорость и координаты объекта, после чего они передаются в систему управления», — поясняют в Ростехе.
Инерциальная навигационная система: как это работает

Долгое время отсутствие точной информации о местоположении самолета или вертолета было серьезным препятствием на пути развития авиации. Пилотам была необходима навигационная система, которая не зависела бы от земных ориентиров и капризов природы. Появление автономных инерциальных систем навигации стало большим шагом в истории авиации. Первые инерциальные системы в нашей стране были разработаны в 1960-х годах в Раменском приборостроительном КБ, входящем сегодня в концерн «Радиоэлектронные технологии» (КРЭТ) Госкорпорации Ростех.
В автономном полете
Первые пилоты в движении ориентировались по солнцу, звездам или компасу, затем появились радиосигналы, но все эти способы зависели от внешних факторов, а значит, не были полностью надежными. Требовался навигационный прибор, анализирующий движение самолета и не использующий внешние источники информации. Все необходимое оборудование должно быть размещено на борту самолета, а система должна функционировать полностью автономно.

Бесплатформенная навигационная система БИНС-СП-1
Такой метод теоретически был разработан в 1930-е годы, но реализовать его удалось только спустя 20 лет. Инерциальная навигация основывается на применении законов механики, в частности на теории устойчивости механических систем, которую разрабатывали русские математики А.М. Ляпунов и А.В. Михайлов. Первые инерциальные навигационные системы (ИНС) были созданы в 1950-е годы в США и СССР. Они были довольно громоздкими и могли занимать все свободное пространство самолета. Современные ИНС изготавливаются с применением микроэлектронных технологий и занимают гораздо меньше места.
ИНС могут решать различные задачи. Это и общая географическая ориентировка, и определение местонахождения относительно заданной траектории или цели, и наведение на движущуюся цель.
Устройство инерциальной системы
Основа работы ИНС заключается в измерении ускорений летательного аппарата и его угловых скоростей относительно трех осей самолета для того, чтобы исходя из этих данных определить местоположение самолета, его скорость, курс и другие параметры. По результатам анализа объект стабилизируется, и может использоваться автоматическое управление.
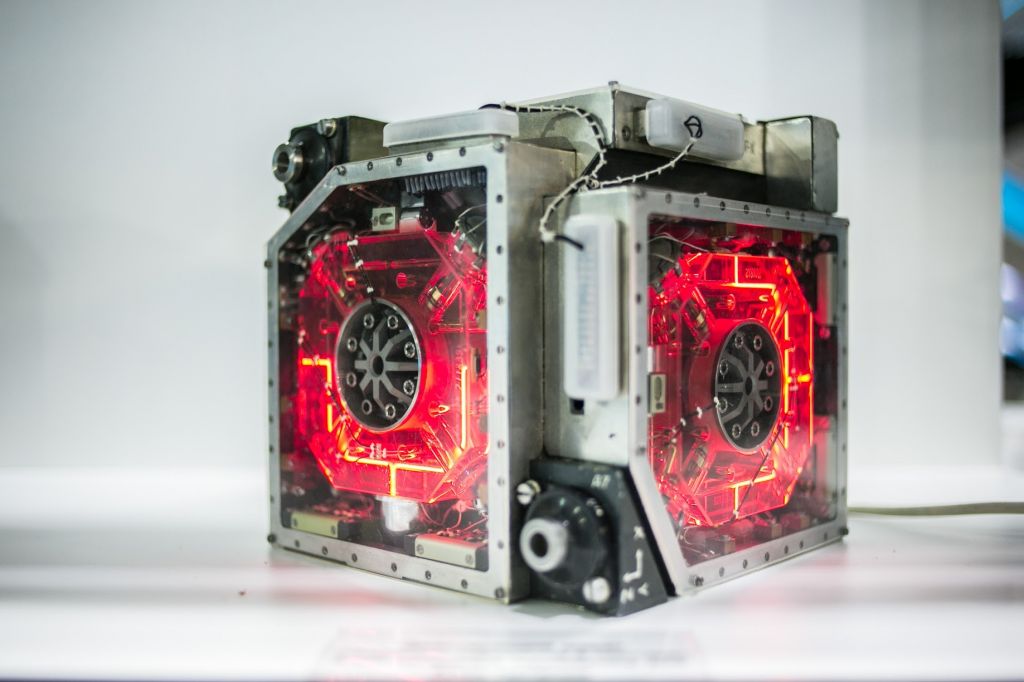

Лазерный гироскоп
Для сбора информации о полете в состав ИНС включаются акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона самолета относительно основных осей: тангаж, рысканье и крен. Точность полученной информации зависит от характеристик этих приборов. Анализом данных занимается компьютер, который затем по определенным навигационным алгоритмам корректирует движение объекта.
ИНС делятся на платформенные и бесплатформенные. Основой для платформенных ИНС служит гиростабилизированная платформа. В бесплатформенных системах акселерометры и гироскопы жестко связаны с корпусом прибора. Функции платформы моделируются математически вычислительной системой. Бесплатформенные системы выгодно отличаются меньшим весом и габаритами, а также возможностью работать при значительных перегрузках.
Преимущества ИНС перед другими навигационными системами заключаются в их полной независимости от внешних источников данных, повышенной защите от помех, высокой информативности и возможности передавать информацию на большой скорости. Отсутствием какого-либо излучения при работе ИНС обеспечивается скрытность объекта, на котором она используется.
Недостатком ИНС можно назвать ошибки, которые накапливаются с течением времени в получаемой от приборов информации. Это могут быть как методические ошибки, так и ошибки, связанные с неверной начальной настройкой оборудования. Для их коррекции создаются интегрированные навигационные системы, где данные, получаемые ИНС, дополняются данными, поступающими от неавтономных систем, например спутниковой навигации. Еще одним относительным минусом ИНС является высокая стоимость входящего в их состав оборудования.
Авионика из Раменского
Инерциальные навигационные системы сегодня применяются не только в авиации. Их появление повлияло на развитие космонавтики, увеличилась дальность походов подводных лодок. ИНС используются в управлении морскими судами и баллистическими ракетами, применяются в геодезии. Также актуально применение подобных систем в беспилотных летательных аппаратах.

В 1960-е годы первые в СССР инерциальные навигационные системы для авиации были разработаны Раменским приборостроительным конструкторским бюро (РПКБ). Начиная с 1958 года специалистами РПКБ проводилось эскизное проектирование ИНС для различных классов и типов летательных аппаратов. Совершенствование чувствительных элементов – разработка поплавковых гироскопов и акселерометров, а затем динамически настраиваемых гироскопов – и применение цифровой вычислительной техники обеспечили создание и широкое применение ИНС.
К началу 1970-х годов предприятием были решены проблемы точного управляемого полета на большие расстояния. В дальнейшие годы инерциальные системы многократно совершенствовались. Раменское предприятие создавало навигационные комплексы и другое оборудование для самолетов ОКБ Сухого, Микояна, Туполева, Ильюшина, Камова, Миля и др. В 2012 году предприятие вошло в состав концерна «Радиоэлектронные технологии». Сегодня РПКБ – один из мировых лидеров в производстве авиационной электроники.
Похожие публикации:
- Как загрузить xml файл в личный кабинет налогоплательщика
- Как сделать свою раскладку клавиатуры
- Как фоновый процесс сделать активным
- Какая команда будет выполнена после следующих действий нажми на вкладку файл затем нажми на создать



