Выверка и наладка передач, соединяющих валы двигателя и машины, необходимы для нормальной работы электропривода. Они выполняются в процессе монтажа электропривода и заключаются в том, чтобы добиться необходимого расположения электродвигателя относительно закрепленной рабочей машины. Их взаимное расположение определяется видом передач. Различные передачи выверяют различными способами.
Достаточно трудоемкой является выверка непосредственных соединений валов электродвигателя и рабочей машины или механизма с помощью муфт. Для нормальной работы электропривода здесь требуется такое взаимное расположение ЭД и производственного механизма, при котором оси их валов находились бы на одной прямой линии. Подобную выверку передачи часто называют центровкой. Добиться точного выполнения этих требований бывает трудно, поэтому допускаются некоторые отклонения от них. К высокоскоростным электроприводам и жестким соединениям (например, с помощью поперечносвертной муфты) предъявляются более жесткие требования, чем к низкоскоростным электроприводам и эластичным (упругим) соединениям.
Непосредственные соединения выверяют в два приема: предварительно и окончательно. Предварительная выверка может выполняться с помощью металлической линейки (без специальных приспособлений) следующим образом. Линейку прикладывают ребром к ободу в верхней точке полумуфты на валу машины и проверяют, есть ли зазор между ребром линейки и второй полумуфтой. При наличии зазора под лапы электродвигателя подбивают стальные прокладки толщиной 0,5—0,8 мм до его ликвидации. Если таких прокладок требуется более трех-четырех, их заменяют одной соответствующей толщины, так как большое число прокладок нарушает центровку двигателя при закреплении. Осевое смещение определяют, прикладывая линейку к боковым поверхностям полумуфт, а осевые зазоры устраняют поворотом электродвигателя в горизонтальной плоскости.
При высокой точности центровки пользуются специальными скобами, которые закрепляют на ступицах обеих полумуфт с помощью болтов и хомутов (рисунок 8, а). Зазоры А и Б замеряют с помощью щупов в четырех точках по окружности через 90°, начиная с верхней точки. Изменяя положение вала электродвигателя, добиваются равенства одноименных зазоров при любом угле поворота.

Рисунок 8 – Выверка соосности валов электродвигателя и машины при соединении их муфтами:
а — с помощью скоб; б — с помощью изогнутых проволок; 1 — вал машины; 2 — скобы; 3 — вал электродвигателя; 4 — проволока; 5 — полумуфты.
Выверку соединений муфтами валов двигателя и рабочей машины в производственных условиях часто выполняют с помощью двух жестких проволок, закрепленных на ступицах обеих полумуфт. Свободные концы предварительно заточенных на конус проволок загибают навстречу друг другу буквой Г (рисунок 8, б). Между остриями стрелок оставляют небольшой зазор (до 1 мм). Обе полумуфты скрепляют болтом (не жестко) и вращают от руки. Изменение зазоров между проволочками в очках 0°, 90°, 180° и 270° замеряют щупом или определяет визуально. При вращении полумуфт добиваются такого положения двигателя в вышеуказанных точках, чтобы зазоры не изменялись.
Бензиновые двигатели. Как выбрать? Чем отличаются ? Какой лучше взять?
Электродвигатели с выверенной передачей закрепляет на опорном основании с помощью болтов и гаек и снова выверяют точность установки, так как при закреплении центровка может быть нарушена.
При выверке ременных передач добиваются, чтобы валы электродвигателя и рабочей машины были параллельны, а поперечные оси шкивов находились на одной прямой. Несоблюдение этих условий при плоскоременной передаче приводит к спаданию ремня, а при клиноременной — к преждевременному ее изнашиванию.
В зависимости от межосевого расстояния выверку можно осуществлять металлической линейкой (при малом), либо с помощью нитки или тонкой проволоки (при любом межцентровом расстоянии). При одинаковой ширине шкивов двигатель перемещают до тех пор, пока натянутая нитка не коснется одновременно четырех диаметрально противоположных точек на торцах обоих шкивов. Если межцентровое расстояние небольшое, то для этой цели удобнее пользоваться металлической линейкой, которую прикладывают к шкивам боковой поверхностью (ребром) и добиваются касания четырех диаметрально противоположных точек шкивов.
Если ширина шкивов различная, выверочную линейку прикладывают ребром к двум диаметрально противоположным точкам на торце большего шкива и добиваются, чтобы зазоры между линейкой и крайними точками на торце меньшего шкива были равны половине разности ширины шкивов. В случае, если межосевое расстояние больше длины линейки, то выверить передачу можно с помощью отвесов, переброшенных через поперечные оси шкивов, под которыми натянута нитка.
После выверки передачи электродвигатель закрепляют на опорном основании, передачу закрывают защитным кожухом, обмотки двигателя соединяют по соответствующей схеме и подключают к источнику питания.
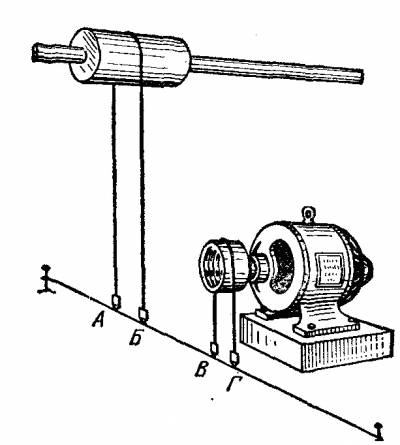
Рисунок 9 – Выверка установки электродвигателя с ременной передачей при разной ширине шкивов
Перед окончательным закреплением выверяют горизонтальное положение двигателя, а также совпадение его оси с осью вала приводимого механизма (выверка линии валов). При ременной передаче такую выверку выполняют с помощью стальных линеек, прикладываемых к торцам шкивов (при одинаковой их ширине). Если ширина шкивов разная, выверку делают шнуровыми отвесами (рисунок 9). От приводимого шкива до пола опускают два отвеса Л и Б и протягивают между ними шнурок, образующий прямую линию. От середины шкива электродвигателя тоже опускают два отвеса В и Г и перемещают электродвигатель до совпадения отвеса его шкива со шнуром.
- Войдите, чтобы оставлять комментарии
Pereosnastka.ru

Типы валов
К атегория:
Крупные электрические машины
Типы валов
Валы относятся к наиболее нагруженным деталям электрических машин. При работе машины на вал действуют значительные нагрузки от веса ротора (якоря), сил динамической неуравновешенности его и сил магнитного притяжения. В связи с этим к валам электрических машин предъявляются высокие требования как в отношении механических характеристик материала, так и точности и чистоты обработки поверхностей.
Валы крупных электрических машин имеют ступенчатую форму. Диаметры основных наиболее нагруженных ступеней определяют расчетами; диаметры остальных ступеней выбирают, исходя из конструктивных и технологических соображений.
Места перехода от одной ступени вала к другой выполняют закруглениями (галтелями) возможно большего радиуса для предупреждения недопустимой концентрации напряжений; величина этого радиуса зависит от разности диаметров ступеней и радиуса закругления втулки, упирающейся в галтель. При этом радиус закругления втулки должен быть больше радиуса галтели вала.
Крайнюю ступень вала, предназначенную для насадки на нее жестких или эластичных муфт, принято называть свободным концом; этот конец может быть выполнен: цилиндрическим— для машин со стабильным режимом работы и коническим — для машин с резкими перегрузками.
В сильно нагруженных валах, передающих большие крутящие моменты, конструкция свободного конца с муфтой, закрепленной на шпонке, недостаточно надежна. В таких случаях применяют сложную поковку, в которой вал и фланец представляют одно целое.
Сопряжение вала с насаженными деталями осуществляется по посадкам второго класса точности системы отверстия. На различных ступенях валов обычно имеются шпоночные канавки.
В настоящее время в крупном электромашиностроении широко применяют горячие посадки взамен прессовых и легкопрессовых, что позволило во многих случаях отказаться от шпоночных соединений в качестве дополнительного крепящего элемента.
В зависимости от конструктивного исполнения машин валы подразделяются на ряд типов.
1. Бесфланцевые валы с двумя подшипниковыми шейками наиболее распространены в электрических машинах; на рис. 1, а показана конструкция такого вала. Соединение электрических машин, имеющих бесфланцевые валы, между собой или с другими машинами осуществляют посредством полумуфт, насаживаемых на свободные концы валов.
2. Фланцевые валы применяются в одно-опорных машинах; в двухопорных они встречаются редко, так как стоимость поковок для таких валов выше, чем для бесфланцевых.
3. Ребристые валы. В некоторых электрических машинах сердечники роторов (якорей) насаживаются непосредственно на вал; в таких случаях в валах для улучшения вентиляции сердечника фрезеруют каналы, и они приобретают ребристую форму.
4. Валы с приваренными ребрами находят широкое применение в машинах средних мощностей; сварная конструкция позволяет уменьшить диаметр сплошного тела вала, так как ребра увеличивают его жесткость. Для снижения концентрации местных напряжений и снятия внутренних напряжений в этих валах необходимо выполнять плавный переход от цилиндрической поверхности к ребрам и производить их термическую обработку после приварки ребер.
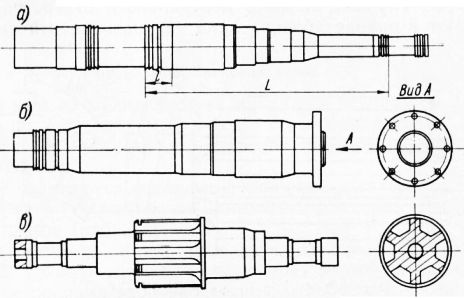
Рис. 1. Типы валов:
а — бесфланцевый с двумя подшипниковыми шейками; б — с фланцем; в — ребристый.
При сварной конструкции часто представляется возможным изготовлять валы из круглого сортового проката, что значительно экономичнее, чем изготовление их из поковок.
5. Валы с центральным отверстием применяются в ряде машин для облегчения веса якоря; так, например, при центральном отверстии вала, равном половине диаметра наружной поверхности, вес вала уменьшается на 25% со снижением прочности его всего на 6—7%. Для этой же цели в некоторых случаях, помимо центрального отверстия, предусматривают в районе «бочки» вала так называемый «карман».
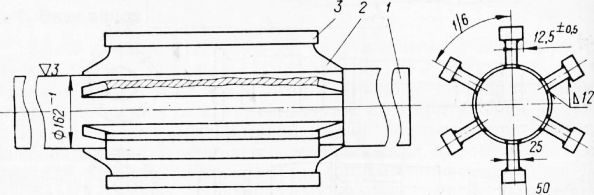
Рис. 2. Вал с приваренными ребрами.
1 — вал; 2 — ребра; 3 — брусья.
Диаметр центрального отверстия в валах крупных машин достигает 350 мм.
В быстроходных синхронных и асинхронных машинах (с фазным ротором) центральное отверстие используется для размещения токоподвода; в возбудителях турбогенераторов в центральном отверстии вала расположен торсионный валик, посредством которого якорь возбудителя эластично соединяется с ротором турбогенератора.
Крепление деталей на валах электродвигателей
Любая электромашина имеет вал, который должен быть механически соединен с подвижными звеньями механизма. С этой целью на валу электродвигателя устанавливается и закрепляется зубчатое колесо, муфта, шкив или какое-либо другое устройство для передачи движения.
Выбрав двигатель, конструктор уже не волен выбирать способ крепления деталей на его валу, так как этот способ почти всегда предопределен изготовителем двигателя. Роль конструктора в этом случае сводится к правильной оценке функциональных и технологических свойств соединения вала с закрепленной на нем деталью и к конструированию этой детали.
В приведенных в пособии электродвигателях (см. гл.5) предусматриваются следующие виды соединений валов с установленными на них деталями:
а) соединение с помощью конического или цилиндрического штифта;
б) соединение с помощью шпонки, в малогабаритных двигателях — обычно сегментной;
в) соединение с помощью поперечного штыря;
г) соединение с помощью установочного винта.
Форма и размеры концов валов двигателей регламентированы ГОСТ 12081-66. Конструкция, размеры и точность концов валов приводятся в габаритном чертеже двигателя.
При установке детали на цилиндрический конец вала необходимо выбрать посадку, обеспечивающую достаточную точность центрирования и в то же время гарантирующую простую сборку и разборку узла. Обычно используется одна из посадок с зазором. Из-за несимметричного расположения зазора между валом и отверстием возможно возникновение эксцентриситета, наибольшая величина которого равна половине максимального зазора. Для уменьшения эксцентриситета нужно было бы выбрать переходную посадку или даже посадку с гарантированным натягом, но этого делать не следует, поскольку в этом случае при сборке можно повредить подшипники или вал ротора двигателя.
Примеры крепления деталей на валах электродвигателей приведены на схемах 3.1-3.5.
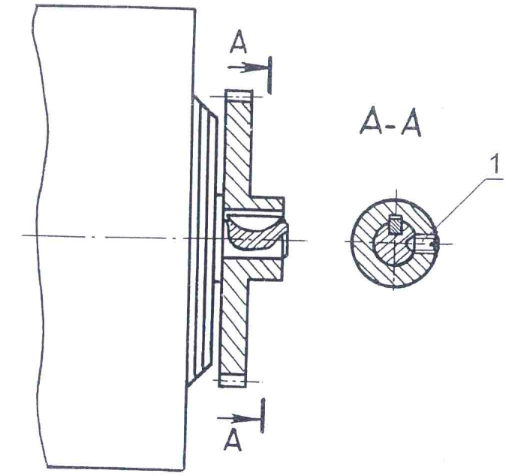
3.1 Крепление детали при помощи штифта. 1. Штифтование деталей, закрепляемых на гладком цилиндрическом конце вала двигателя, используют, если никаких других способов передачи вращающего момента не предусмотрено. Для этого применяют конические штифты по ГОСТ 3129-70 или цилиндрические штифты по ГОСТ 3128-70. Применение конических штифтов предпочтительнее, так как надежность такого соединения выше. Вероятность произвольного выпадения правильно запрессованного штифта ничтожна.
2. В сопряжении вала и отверстия используется посадка с нулевым зазором или одна из переходных посадок с малым возможным натягом. Расположение поля допуска вала и квалитет указываются изготовителем двигателя.
3. Частая разборка не желательна, так как выпрессовка штифта достаточно сложна.
4. При конструировании необходимо предусмотреть возможность штифтования до установки двигателя на место, поэтому закрепленная на валу деталь по своему диаметру должна свободно проходить через расточку корпусной детали.
3.2 Установка детали на валу с помощью сегментной шпонки.1. На конце вала заводом-изготовителем двигателя должна быть установлена сегментная шпонка или предусмотрен паз для нее.
2. В сопряжении вала и отверстия используется посадка с нулевым зазором, что в сочетании с сопряжением шпонки и паза в отверстии детали обеспечивает достаточно тугое соединение, предотвращающее произвольное перемещение детали на валу. Расположение поля допуска вала и квалитет указываются изготовителем двигателя.
3. В ответственных случаях для исключения осевого смещения детали применяется стопорный винт 1. Используется винт с плоским концом по ГОСТ 1477-93 или винт с коническим концом по ГОСТ 1476-93. В последнем случае необходимо предварительное засверливание вала.
4. Процесс сборки удобен и малотрудоемок, но разборка, как правило, требует применения специального съемника.
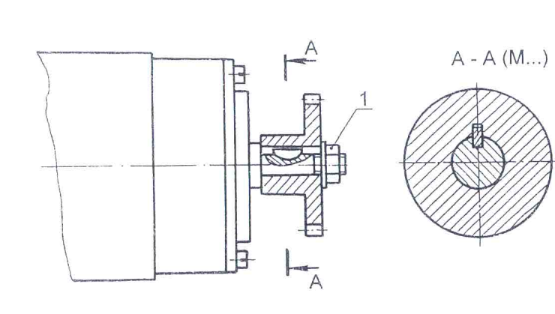
3.3 Установка детали на конце вала со шпонкой и резьбой.1. На конце вала заводом-изготовителем двигателя предусмотрена сегментная шпонка и резьба. Шпонка обычно входит в комплект двигателя и поставляется вместе с ним.
2. Гайка 1 надежно удерживает установленное на валу зубчатое колесо от осевого смещения. В особо ответственных случаях может быть использовано одно из средств, предотвращающих самоотвинчивание гайки: например, установка пружинной шайбы по ГОСТ 6402-70.
3. В сопряжении вала и отверстия используется посадка с небольшим гарантированным зазором. Расположение поля допуска вала и квалитет указываются изготовителем двигателя. Такая посадка обеспечивает простую сборку и разборку.
4. Желательно, чтобы установленная на валу деталь не выходила по своему диаметру за пределы посадочного отверстия двигателя, для того чтобы ее можно было закрепить до установки двигателя в механизм.
5. О необходимости запаса длины резьбы S см. п.З конструкции 3.5.
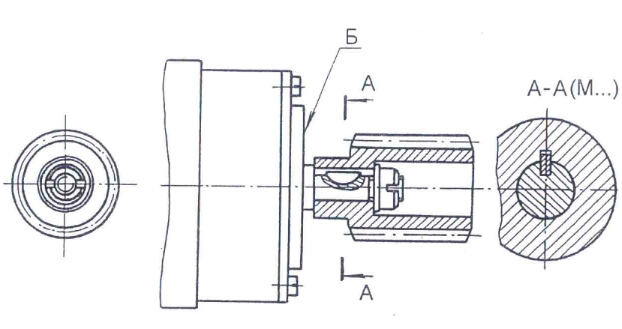
3.4 Установка детали на конце вала со шпонкой и резьбой.1. Приведенная конструкция во всех отношениях аналогична конструкции 3.3 и используется для тех же типов двигателей.
2. По такому принципу на концах валов двигателей устанавливаются червяки, зубчатые колеса с широкими венцами или зубчатые колеса с венцом, отнесенным от торца Б двигателя на расстояние, большее, чем длина выступающей части вала.
3. Так как точка приложения рабочей нагрузки при таком закреплении детали расположена на значительном расстоянии от передней опоры вала двигателя, жесткость конструкции оказывается пониженной.
4. Вместо шестигранной гайки в этой конструкции часто используют круглую гайку со шлицом на торце по ГОСТ 10657-0.
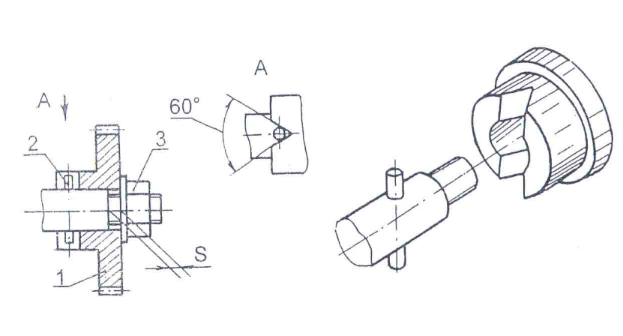
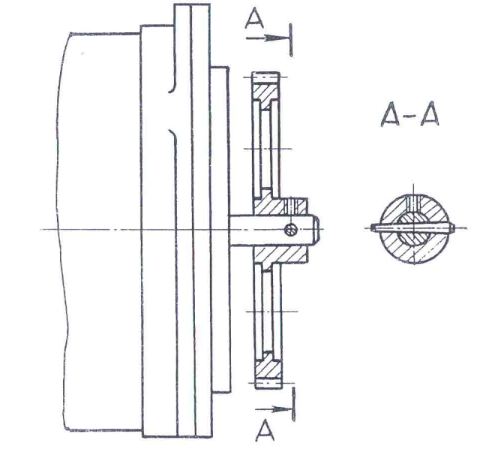
3.5 Установка детали на конце вала с поперечным штырем и резьбой.1. Закрепляемая на валу деталь 1 центрируется своим отверстием на цилиндрическом участке вала двигателя. Вращающий момент передается за счет того, что штырь 2 входит в клиновой паз детали 1. Боковые стороны паза прижимаются к штырю гайкой 3.
2. При затягивании гайки исключаются боковые зазоры, так как контакт между штырем и пазом происходит не по его дну, а по боковым сторонам.
3. Необходимо обеспечить запас длины резьбы S, чтобы гайка не смогла упереться в конец нарезанной части вала раньше, чем закрепляемая деталь займет нужное осевое положение. 5 Длина нарезанной части вала указана в габаритном чертеже двигателя (см. гл.5).
4. О посадке з сопряжении вала и отверстия см. п. З конструкции 3.3.
Дата добавления: 2022-01-31 ; просмотров: 1089 ;
Что такое вал электродвигателя?

Так же, в зависимости от назначения и функциональности двигателя, Вал может иметь различное число выходных концов – один или два. При этом в отношении второго варианта концы могут быть как одинакового диаметра, так и иметь различия. Такие валы применимы в трёхфазных электродвигателях как общепромышленного, так и специального назначения. Бывают случаи, когда один конец имеет цилиндрическую форму, а второй – коническую. Такая комбинация характерна для крановых электродвигателей, где в условиях одного устройства выполняются различные по направлению действий задачи. Поскольку второй конец вала всегда прикрыт колпаком, то вариант двигателя с двумя выходными валами всегда решается с заказчиком индивидуально.
Главная задача вала, как известно – это передача усилия от электромотора, задавая требуемую частоту вращения механизмов, выполняющих определённую задачу. Используют для передачи шкивы, муфты или шпонки, если речь идёт о прямом участии двигателя, как, например, в современных стиральных машинах. Наша электротехническая компания по продаже автоматизированных приспособлений, узлов и аппаратов, а так же разнообразных комплектующих позаботилась о том, чтобы каждый электродвигатель, предлагаемый нами, был оснащён только качественным валом, изготовленным из высококачественной стали, прошедшей термическую и прочую обработку и имеет высокую степень допуска и точность изготовления.
Требования к валу
В электротехнической машине вал испытывает самую большую нагрузку, так как передаёт крутящий момент выполняющему определённую работу механизму. От показателей жёсткости и прочности так же будут зависеть качество работы электродвигателя, а значит и всего электрического агрегата. В зависимости от характера работы валы может отличаться конструктивными особенностями упоминаемых выше ступеней. По техническим требованиям валов должны соблюдаться следующие условия:
Выполнение данных требований позволяет купить электродвигатель с максимальной величиной прочности его рабочего элемента, приводящего в действие целые электротехнические машины, производственные линии, гидравлические, вентиляционные и обрабатывающие системы. Наша компания, имеющая достаточный опыт в данной сфере сотрудничает только с самыми ответственными зарубежными и отечественными изготовителями электродвигателей, чтобы предоставить покупателю высококлассную продукцию с большим эксплуатационным периодом в пределах различной степени возможных нагрузок.
Остались вопросы?
Специалисты ЭНЕРГОПУСК ответят на Ваши вопросы:
8-800-700-11-54 (8-18, Пн-Пт)
Рекомендации по выбору вида, типа и мощности двигателя электропривода
При работе электропривода с длительной постоянной нагрузкой задача выбора электродвигателя (постоянного тока, асинхронного, синхронного) относительно проста.
Для электропривода, не требующего регулирования скорости в больших диапазонах ее изменения, рекомендуется применять синхронные двигатели. Эта рекомендация объясняется тем, что современный синхронный двигатель пускается в ход также быстро как и асинхронный, а его габариты меньше и работа экономичнее, чем асинхронного двджигателя той же мощности (у синхронного двигателя выше коэффициент мощности cosφ и больше максимальный момент Mmax на валу).
При этом у асинхронных двигателей последнего поколения можно достаточно эффективно регулировать скорость вращения, осуществлять реверс с необходимым моментом для работы электропривода, но для этого применяются специальные устройства управления.
Но если электродвигатель привода должен работать в условиях регулируемой частоты вращения, реверса, частых пусков, больших изменений нагрузки, то при выборе вида двигателя необходимо сопоставить условия работы электропривода с особенностями механических характеристик различных видов электродвигателей.
В электротехнике принято различать естественную и искусственную механические характеристики двигателя. Естественная характеристика соответствует номинальным (рабочим) условиям его включения, нормальной схеме соединений и отсутствию каких-либо добавочных элементов в цепях двигателя и соединении этих цепей по специальным схемам.
Важным критерием для оценки механических характеристик электродвигателя служит их жесткость:
где: ΔM — изменение момента на валу двигателя;
Δn — изменение скорости вращения ротора двигателя.
В зависимости от значения жесткости принято делить механические характеристики на абсолютно жесткие, Δn = 0,λ = ∞ (синхронные двигатели), жесткие, у которых изменение частоты вращения мало λ = 40 ÷ 10 (линейная часть характеристики асинхронного двигателя, характеристика двигателя постоянного тока с параллельным возбуждением), мягкиес большим изменением частоты вращения, у которых λ ≤ 10 (характеристика двигателя постоянного тока с последовательным возбуждением, искусственная характеристика асинхронного двигателя с фазным ротором, искусственная характеристика двигателя постоянного тока с параллельным возбуждением).
На рис. 1 представлены естественные механические характеристики различных видов двигателей.
Требования к жесткости механической характеристики в ряде случаев являются основанием для выбора вида двигателя.
При частых пусках и непостоянной нагрузке наиболее надежным, экономичным и простым в эксплуатации является асинхронный двигатель с короткозамкнутым ротором. При больших мощностях, если невозможно применить коротко-замкнутый асинхронный двигатель, устанавливается асинхронный двигатель с фазным ротором.
Двигатель постоянного тока сложнее по конструкции (из-за наличия коллекторно-щеточного узла), стоит дороже, требует более тщательного ухода в эксплуатации и изнашивается быстрее, чем двигатель переменного тока. Однако, в ряде случае предпочтение отдается двигателю постоянного тока, позволяющему простыми средствами изменить частоту вращения электропривода в широких пределах.
Тип двигателя (его конструкцию) выбирают в зависимости от условий окружающей среды. Приходится учитывать необходимость защиты среды от возможных искрообразований в двигателе (при наличие взрывоопасной атмосферы), а также самих двигателей от попадания в них влаги, пыли, химических веществ из окружающей среды.
Во многих случаях в приводах необходимо регулировать скорость вращения ротора двигателя.
Для регулирования частоты вращения двигателя существует два надежных, но существенно несовершенных метода:
- включение резисторов в цепи якорных обмоток ротора;
- переключение числа пар полюсов обмотки статора.
Первый метод рационален лишь при узких пределах регулирования при постоянстве момента на валу двигателя, а второй обеспечивает лишь дискретное (ступенчатое) регулирование и практически применяется в основном для маломощных приводов.
В настоящее время благодаря появлению мощных полупроводниковых приборов положение в этой области существенно изменилось. Современные электронные преобразователи дают возможность изменять в широком диапазоне частоту переменного тока, что позволяет плавно регулировать скорость вращающегося магнитного поля, а следовательно эффективно регулировать частоту вращения асинхронного и синхронного двигателей.
Оптимальный выбор мощности электродвигателя для привода должен удовлетворять следующим требованиям:
- надежность в работе;
- возможность работоспособного состояния в различных условиях;
- экономичность в эксплуатации.
Установка двигателя большей мощности, чем это необходимо по условиям работы привода, вызывает излишние потери энергии при работе электрической машины, обуславливает дополнительные капитальные вложения, увеличение массы и габаритов двигателя.
Установка электродвигателя меньшей мощности снижает производительность электропривода и делает его работу ненадежной. При этом сам электродвигатель в подобных условиях может быть поврежден.
Электродвигатель необходимо выбирать так, чтобы его мощность использовалась возможно полнее. Во время работы двигатель не должен нагреваться до предельно допустимой температуры, в крайнем случае на очень непродолжительное время. Кроме того, двигатель должен нормально работать при возможных временных перегрузках и развивать пусковой момент на валу тот, который требуется для нормального функционирования исполнительного механизма.
В соответствии с этим мощность двигателя выбирается в большинстве случаев на основании условий нагревания до предельно допустимой температуры. Производится так называемый выбор мощности по нагреву. Затем осуществляется проверка соответствия перегрузочной способности двигателя условиям пуска машины и временным перегрузкам. Иногда, при большой кратковременной перегрузке, приходится выбирать двигатель, исходя из требуемой максимальной мощности. В подобных условиях максимальная мощность двигателя длительное время, как правило, не используется.
Выбор мощности для привода с продолжительным режимом работы при постоянной или незначительно меняющейся нагрузке на валу является простым. В этом случае мощность двигателя должна быть равна мощности нагрузки, а проверки на перегрев и перегрузку во время работы электропривода не нужны (это объясняется изначально определенными условиями работы электродвигателя). В тоже время необходимо проверить, достаточен ли пусковой момент на валу двигателя для пусковых условий данной электрической машины.
Мощность продолжительной нагрузки определяется на основании проверенных практикой теоретических расчетов.
Рассмотрим конкретный пример. Например, мощность двигателя для вентилятора (и не только его, а любого двигателя) можно определить, как
где: V — количество нагнетаемого воздуха, м 3 /с 2 ;
Δр — перепад давления, Па;
ηвен — коэффициент полезного действия (КПД) вентилятора (у крыльчатых вентиляторов он равен 0,2 ÷ 0,35);
ηпер — КПД передачи от двигателя к крыльчатке вентилятора.
В приведенной формуле произведение VΔр рпредставляет собой полезную мощность вентилятора, а 1000 — коэффициент для перевода мощности в киловатты.
В инженерных расчетах для определения мощности электродвигателя привода при продолжительной его работе используют электрические (полученные экспериментальным путем) формулы, проверенные длительной практикой.
При кратковременном, повторно-кратковременном и продолжительном с переменной нагрузкой режимах работы электропривода важно знать закон изменения во времени превышения температуры двигателя над температурой окружающей среды.
Электрическая машина с точки зрения нагревания представляет собой весьма сложное тело. Тем не менее при инженерных расчетах, не требующих большой точности, можно считать электрическую машину однородным телом.
Это дает возможность применить к ней упрощенное уравнение нагревания:
где: С — теплоемкость электрической машины;
Н — теплоотдача машины;
Q0 — теплота, выделяемая в машине в единицу времени.
Рассмотрим два крайних случая: t = ∞ и t = 0. При t = ∞ получим: Qodt = HVmaxdt. (4)
Решая это уравнение методом разделения переменных, получаем
где — постоянная времени нагрева машины, определяемая экспериментально.
При t = 0 начальное превышение температуры будет V = V0, на основании чего постоянная A = Vmax — V0, а закон нарастания превышения температуры машины будет иметь вид
Таким образом превышение температуры машины V над температурой окружающей среды возрастает по показательному закону, стремясь к значению Vmax. Значение начального превышения температуры V0 лишь изменяет скорость нарастания температуры, не изменяя характера процесса (рис. 2).
При различных значениях продолжительной нагрузки одной и той же машины в диапазоне мощностей электродвигателя (Р1, Р2, … Рном, … Рк, … Рn) графики V(t) будут отличаться лишь ординатами (рис. 3).
Наибольшее допустимое для данной машины превышение температуры равно Vном. Прямая, параллельная оси абсцисс Vном пересекает в различных точках кривых V(t), соответствующие различным значениям нагрузки электродвигателя.
Абсцисса точки пересечения определяет тот промежуток времени tk, в течение которого мощность двигателя может быть временно равна мощности Рк, представляющей собой перегрузку по отношению к его номинальной мощности в продолжительном режиме работы. Кривая нагревания, асимптотически приближающаяся к Vном через промежуток времени tn, соответствует номинальной мощности электродвигателя Рном. При нагрузках, меньших Рном, мощность двигателя используется не полностью. Однако, если двигатель загружается до номинальной мощности только на относительно короткое время, то по сути он тоже используется не на полную мощность. Целесообразно его кратковременно перегрузить, и чем меньше продолжительность работы, тем больше должна быть эта перегрузка. Предел повышения нагрузки двигателя по мере уменьшения продолжительности включения определяется мгновенной перегрузочной мощностью двигателя, зависящей от его электромагнитных, механических и коммутационных свойств (максимального момента мощности на валу у асинхронного двигателя, условий коммутации щеточно-коллекторного узла у машин постоянного тока и т.п.).
При повторно-кратковременном режиме электродвигатель попеременно то нагревается, то охлаждается. Изменение его температуры в течение времени каждого цикла «включение — выключение» зависит при этом от предыдущего теплового состояния.
График зависимости нагревания и охлаждения машины от времени в подобных условиях показан на рис. 4.
Конечное превышение температуры каждой данной части цикла является начальным превышением температуры для последующей части цикла. Если во время той или иной части цикла наступает заметное изменение условий охлаждения электрической машины (остановка двигателя или существенное изменение частоты вращения ротора), то это изменяет значение постоянной времени нагрева машины τ, что должно быть учтено при построении графиков.
Рассмотренные методы определения мощности электродвигателя по температурным условиям посредством построения графиков нагревания требуют значительной затраты времени и трудоемких аналитических расчетов. В то же время графический метод сам по себе содержит систематические ошибки и в конце концов не дает точных результатов. Графические методы приведены выше лишь для того, чтобы наглядно показать картину изменения нагрева двигателя при переменной нагрузке.
В большинстве случаев для такого выбора мощности электродвигателя применяется более простые, так называемые инженерные расчеты, в частности эквивалентного тока. В основу метода эквивалентного тока положено допущение, что при переменной нагрузке двигателя его средние потери должны быть равны потерям при продолжительной (номинальной) нагрузке.
Как известно из теории электрических машин, мощность потерь двигателя складывается из постоянных Рпост и переменных Рпер мощностей. Мощность постоянных потерь равна сумме мощности потерь на трение, в магнитопроводе (у асинхронных двигателей и двигателей постоянного тока с параллельным возбуждением), на возбуждение у синхронных двигателей и двигателей с параллельным возбуждением. Мощность переменных потерь можно считать пропорциональной квадрату рабочего тока I двигателя и сопротивлению соответствующей обмотки r, причем приближенно можно считать последнее постоянным. Если ток изменяется за соответствующие промежутки времени, то за все рабочее время Σt=T суммарные потери энергии в двигателе будут равны
При переменной нагрузке эквивалентным током Iэк, за то же время работы электродвигателя Т потери энергии в двигателе вычисляются по более простой формуле:
Зная эквивалентный ток, номинальное напряжение и номинальный коэффициент мощности, можно определить номинальную мощность двигателя:
Метод эквивалентного тока можно применять лишь при условии постоянства мощности потерь в магнитопроводе и на трение, а также сопротивлений обмоток в течение всего рабочего времени Т.
В ряде случаев условия нагрузки определяют непосредственный момент, требуемый от двигателя, а не ток. Тогда можно пользоваться методом эквивалентного момента: у всех электродвигателей вращающий момент на валу пропорционален произведению тока и магнитного потока. У двигателей переменного тока (синхронных и асинхронных) можно приближенно считать постоянным коэффициент мощности cosφ.
При таких упрощениях можно считать вращающий момент
где Квр — постоянная величина, откуда из вышеприведенного выражения для эквивалентного тока Iэк можно получить:
Далее по эквивалентному моменту и номинальной угловой скорости двигателя ωном рассчитывается номинальная мощность двигателя электропривода:
Для повышения надежности работы электропривода рекомендуется проверить, достаточен ли максимальный момент Мmах двигателя для того, чтобы удовлетворить требованиям кратковременных возможных перегрузок данного привода; иными словами должно быть выполнено следующее условие: коэффициент перегрузки двигателя λном должен быть по абсолютной величине больше отношения максимального момента Мmах нагрузки к номинальному моменту двигателя, то есть
На этом выбор типа, вида и мощности двигателя может быть закончен.
М. С. ИВАНОВ, В. Н. ДРАЧКОВ,
Санкт-ПетербургскийГосударственныйУниверситет ГражданскойАвиации (СПбГУГА).
Литература
- А. С. Касаткин, М. В. Немцов. Электротехника: уч. пособие для Вузов. — 5-е издание, переработанное. — М.: Энергия, 2003 г.
- В. Ю. Ломоносов и др. Электротехника. М.: Энергоатомиздат, 1990 г.
- Г. Г. Кудрявцев и др. Микропроцессоры в системах технического обслуживания средств связи и управления — М.: Радио и связь, 1999 г.
- В. Н. Драчков, В. В. Панферов. Электротехника и электроника. Ч.1 Электротехника. Учебное пособие. Академия ГА, 2006 г.
- В. Н. Драчков, В. В. Панферов. Электротехника и электроника. Ч. 2 Электротехника. Учебное пособие. Академия ГА, 2004 г.
Подписывайтесь на Elec.ru. Мы есть в Телеграм, ВКонтакте и Одноклассниках
Устройство асинхронных двигателей
Асинхронным называется электрический двигатель переменного тока, частота вращения ротора которого меньше частоты магнитного поля статора.
Статор асинхронного двигателя состоит из литой чугунной или алюминиевого сплава станины, сердечника и обмотки. Воздушный зазор между статором и ротором асинхронного двигателя должен быть предельно малым. Это необходимо, в частности, для уменьшения реактивной мощности, потребляемой двигателем из сети. Устройство ротора асинхронного двигателя принципиально отличается от устройства роторов синхронных машин. По типу ротора асинхронные двигатели разделяются на двигатели с короткозамкнутым (рис. 82) и фазным ротором.
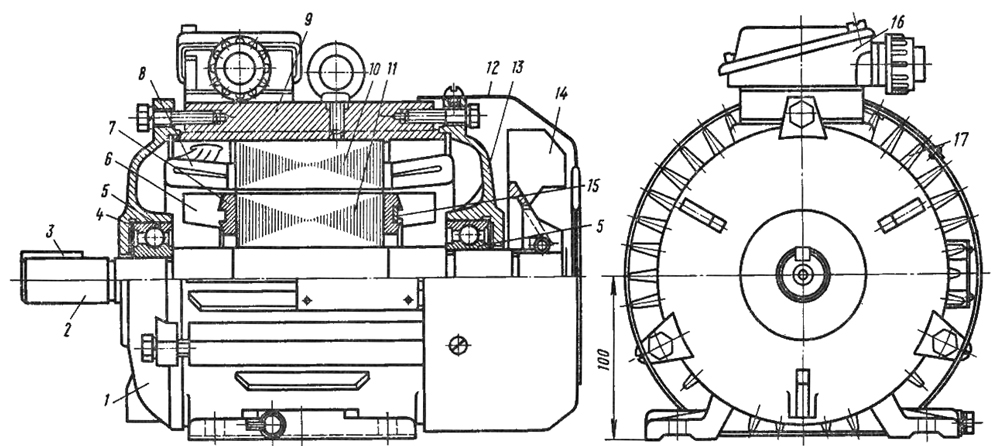
Рис. 82. Асинхронный двигатель с короткозамкнутым ротором единой серии 4А:
1 — передний щит; 2 — вал; 3 — шпонка; 4 — кольцевая установочная пружина; 5 — подшипник; 6 — крыльчатка; 7 — короткозамыкаюшее кольцо; 8 — катушки обмотки статора; 9 — станина; 10 — сердечник статора; 11 — сердечник ротора; 12 — кожух вентилятора; 13 — задний щит; 14 — вентилятор; 15 — балансировочный грузик; 16 — коробка выводов; 17 — охладительные ребра.
В станине 9 электродвигателя с короткозамкнутым ротором размещен сердечник 10 из магнитной электротехнической стали. В пазах сердечника уложены катушки 8 обмоток и заклинены деревянными клиньями. Станина асинхронного электродвигателя отлита из чугуна или алюминиевого сплава и имеет на наружной поверхности продольные ребра 17 для увеличения площади охлаждения. В верхнее ребро станины ввернуто грузовое кольцо для подъема электродвигателя.
На валу 2 короткозамкнутого асинхронного двигателя расположен сердечник ротора 11 из листов стали с пазами, залитыми алюминием. С помощью заливки пазов алюминием образуется обмотка ротора «беличья клетка» с замыкающими кольцами 7 на торцах. Одновременно отливаются и лопасти вентилятора 6. В процессе заливки пазов алюминием пакет сердечника сжимают прессом. Сердечник ротора электродвигателей небольшой мощности закрепляют на рифленой поверхности вала прессовой плотной посадкой, а сердечники более мощных электродвигателей — дополнительно шпонкой.
На шейке вала насажены одинакового размера шарикоподшипники 5, имеющие установочные пружины 4 и защитные шайбы, исключающие попадание смазки внутрь двигателя. Опорой для подшипников являются два подшипниковых щита 1 ч 13 одинаковой формы и размеров.
В более крупных асинхронных электродвигателях на валу ротора устанавливают алюминиевый вентилятор 14 для забора воздуха из окружающей среды и подачи его к наружным поверхностям двигателя. В некоторых сериях электродвигателей (например, А02) установлен второй вентилятор для перемещения воздуха внутри станины и отвода теплоты от ее внутренних частей. Для защиты лопастей вентилятора установлен кожух 12. Вал соединяется с полумуфтой шпонкой 3. Для балансировки ротора применяют грузики 15, установленные на короткозамыкающем кольце 7. Подсоединение вводных проводов от электросети производят с помощью зажимов, установленных в коробке выводов 16, к которым подводят концы обмоток статора.
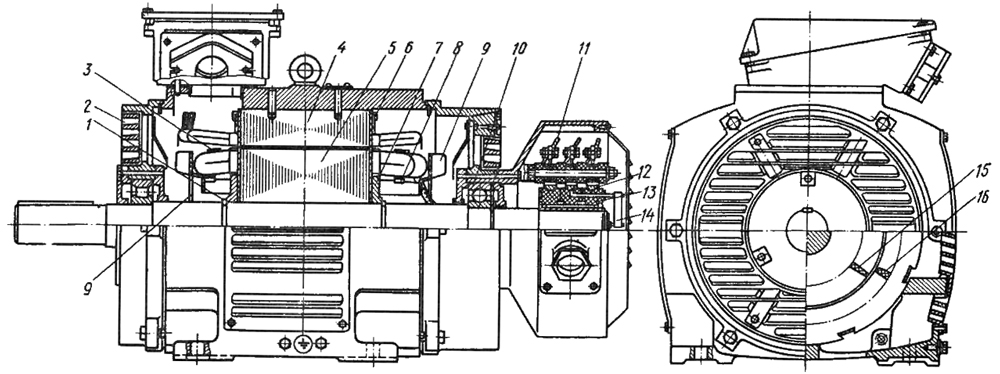
Рис. 83. Асинхронный двигатель с фазным ротором в защищенном исполнении:
1 — стопорное кольцо; 2 — жалюзи; 3 — бандаж обмотки ротора; 4 — сердечник статора; 5 — сердечник ротора: 6 — фиксирующая скоба; 7 — нажимная шайба; 8 — опорное кольцо; 9 — аксиальный вентилятор; 10 — подшипник; 11 — щеткодержатель; 12 — контактное кольцо; 13 — изоляционная втулка; 14 — соединительная перемычка; 15 — паз ротора; 16 — паз статора.
Асинхронный двигатель с фазным ротором (рис. 83) отличается от двигателя с короткозамкнутым ротором наличием обмотки в роторе и контактных колец 12, к которым подсоединены концы роторной обмотки. Контактные кольца изолированы от вала и друг друга. В пазы сердечника ротора 5 вложены стержни обмотки, которые удерживаются в пазах клиньями из дерева или текстолита. Лобовые части стержней не выгибаются под действием центробежных сил благодаря бандажам 3.
Фазные обмотки ротора выполняют по тем же схемам, что и обмотки статора. Число витков в катушках обмоток статора и ротора асинхронной машины не зависят друг от друга, так как обмотки ротора к сети не присоединяются и их напряжение может изменяться в широких пределах. В этой связи стержневые обмотки ротора крупных машин выполняют с одновитковыми катушками. Высокая жесткость стержневой обмотки в этом случае обеспечивает необходимую прочность лобовых частей. Роторные обмотки двигателей до 3 кВт делают мягкими всыпными из провода круглого сечения, при мощности 3 — 10 кВт — жесткими катушечными из провода прямоугольного сечения или стержневыми из голой шинной меди. При мощности выше 100 кВт роторные обмотки делают только стержневыми.
Три фазные обмотки концами соединяются между собой, образуют звезду, а начала обмоток сквозь полый конец вала выводятся к контактным кольцам. На контактные кольца наложены щетки, позволяющие присоединить к фазным обмоткам провода от пускового реостата для управления. Пуск двигателей с фазным ротором (серии АК2) проводят с помощью реостата. Тем самым достигается плавный запуск и увеличивается пусковой момент электродвигателя.
Другие части электродвигателя с фазным ротором конструктивно аналогичны соответствующим частям электродвигателя с короткозамкнутым ротором.
- Устройство синхронных машин
- Устройство машин постоянного тока
- Устройство подшипников электрических машин
- Механические характеристики электрических машин
Осевые колебания асинхронного двигателя
Между наружными кольцами и бортиками крышек у обоих шарикоподшипников (см. рис. 22, а) или у одного из шарикоподшипников (см. рис. 22, б) предусматриваются осевые зазоры 0,5-0,8 мм для возможности смешения подшипников при удлинении вала вследствие нагревания. Бортики крышек ограничивают смешение ротора в первом случае и фиксируют положение одного конца вала (левого) во втором случае и таким образом предохраняют ротор от задевания за неподвижные части электродвигателя. По указанным причинам расстояние между втулками подшипников скольжения делается больше длины вала между шейками на 2-5 мм (рис. 29).
Рис. 29. Расположение статора и ротора: а — при правильной сборке электродвигателя, б — при смещении ротора относительно статора
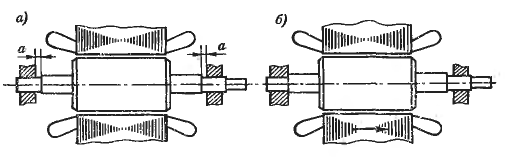
Смещение ротора вызывается осевыми силами, обусловленными: несовпадением положения магнитопроводов ротора и статора по длине машины, скосом пазов ротора или статора, отклонением линии вала от горизонтального положения, недостатками передачи или соединительной муфты. Если эта сила или сочетание сил имеет периодический характер, то могут возникнуть продольные колебания ротора.
При правильной сборке электродвигателя магнитопроводы ротора и статора занимают одинаковое положение по длине машины (рис. 29, а) и у обоих подшипников образуются торцевые зазоры а. В электродвигателях с подшипниками скольжения можно проверить наличие этих зазоров и приблизительно величину их, если нажать деревянным рычагом на торец вала вращающегося ротора. Ротор легко смещается в сторону нажатия. Если происходит устойчивое смешение ротора в одну сторону, иногда до упора в подшипник (рис. 29, б), при холостом ходе и при нагрузке, а при отключении электродвигателя имеются зазоры у обоих подшипников, то причиной смешения является неправильная сборка электродвигателя. Для устранения этой неисправности при установке статора и подшипниковых стоек на обшей фундаментной плите необходимо передвинуть статор, как указано стрелкой на рис. 29, б, или сместить стойки в противоположном направлении. При щитковых подшипниках необходимо сдвинуть втулки в щитах, если это возможно, или проточить вал, увеличив длину одной шейки (левой на рис. 29, б), а на вторую шейку надеть кольцо для уменьшения осевого зазора. При исправных шарикоподшипниках осевое смешение не наблюдается, неправильная сборка электродвигателя приводит к увеличению нагревания и износа шарикоподшипника, воспринимающего осевую нагрузку. Проверку установки подшипников можно произвести путем измерения соответствующих деталей в разобранном электродвигателе. В случае необходимости можно сместить ротор за счет уменьшения бортика крышки, удерживающей наружное кольцо шарикоподшипника.
Если осевое смещение ротора увеличивается при уменьшении нагрузки и получается наибольшим при отключении электродвигателя от сети, то вероятной причиной этого является отклонение вала от горизонтального положения. В этом случае причиной периодического смешения ротора являются осевая составляющая силы тяжести и осевая сила магнитного притяжения.
Рис. 30. Осевая сила при изношенном пальце полумуфты
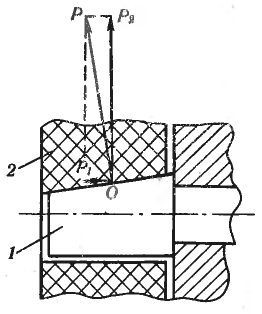

Увеличивающееся осевое смещение ротора при нагрузке электродвигателя может быть вызвано неравномерным износом частей эластичной муфты или недостатками передачи. При непараллельности соприкасающихся частей муфты и оси электродвигателя (рис. 30) давление Р между пальцем 1 муфты и эластичным диском 2 имеет осевую составляющую . Эти составляющие от всех пальцев складываются и могут вызвать осевое смещение ротора. Периодическое смещение ротора может быть вызвано косой сшивкой ремня или другими недостатками передачи или неисправностями соединенной с электродвигателем машины.
Продольные колебания ротора могут нарушить нормальную работу подшипников и щеток, а в некоторых случаях привести к разрушению их, поэтому величина торцевых зазоров не должна превышать рекомендуемые значения. Если в электродвигателе или в передаче при нормальной работе возможно появление неуравновешенных осевых сил (например, вследствие скоса пазов, применения косых зубцов в зубчатых колесах, конических зубчатых или червячных передач), то необходимо выбрать закрепленный шарикоподшипник с учетом этих сил и предусмотреть в подшипнике скольжения увеличенную торцевую поверхность.



