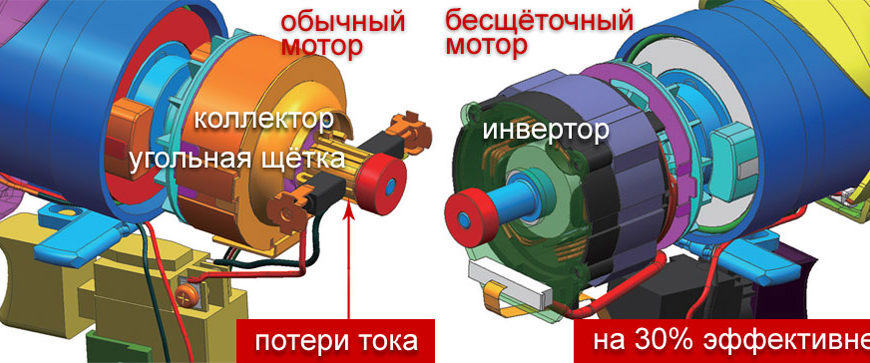
Главная проблема коллекторных двигателей – это как раз-таки наличие коллекторного узла. Щётки стираются, а ламели изнашиваются, от слоя графитовой пыли между ними происходят замыкания, возникает искрение. Этих проблем нет в асинхронных машинах, но работать от постоянного тока они не могут. Бесколлекторный двигатель постоянного тока лишен обозначенных выше недостатков. О том, что это такое, как работает и где используются двигатели БДПТ мы и поговорим в этой статье.
Бесколлекторным называют электродвигатель постоянного тока, ток в обмотках которого переключает специальное устройство-коммутатор — он носит название «драйвер» или «инвертор» и эти обмотки всегда расположены на статоре. Коммутатор состоит из 6 транзисторов, они и подают ток в ту или иную обмотку, в зависимости от положения ротора.
В отечественной литературе такие двигатели называют «вентильными» (потому что полупроводниковые ключи называют «вентилями»), и есть разделение таких электромашин на два вида по форме противо—ЭДС. В зарубежной литературе такое различие сохраняется, один из них называют аналогично русскому «BLDC» (brushless direct current drive или motor), что в дословном переводе звучит как «бесщёточный двигатель постоянного тока» в их обмотках возникает трапецеидальная ЭДС. Вентильные же электродвигатели с синусоидальной ЭДС называют PMSM (Permanent magnet synchronous machine), что переводится как «синхронный электродвигатель с возбуждением постоянными магнитами».
Устройство и принцип действия
Коллектор в КДПТ служит узлом переключения тока в обмотках якоря. В бесколлекторном электродвигателе постоянного тока (БДПТ) эту роль выполняют не щетки с ламелями, а коммутатор она полупроводниковых ключах — транзисторах. Транзисторы переключают обмотки статора, создавая вращающееся магнитное поле, которое взаимодействует с полем магнитов ротора. А при протекании тока через проводник, который находится в магнитном поле, на него действует сила Ампера, за счет действия этой силы и образуется крутящий момент на валу электрических машин. На этом и основан принцип работы любого электродвигателя.

Теперь же разберемся в том, как устроен бесколлекторный двигатель. На статоре БДПТ обычно расположены 3 обмотки, по аналогии с электродвигателями переменного тока их часто называют трехфазными. Отчасти это верно: бесколлекторные двигатели работают от источника постоянного тока (чаще от аккумуляторов), но контроллер включает ток обмотках поочерёдно. Однако при этом не совсем верно говорить, что по обмоткам протекает переменный ток. Конечная форма питающего обмотки напряжения формируется прямоугольными импульсами управления транзисторами.
Трёхфазный бесколлекторный двигатель может быть трёхпроводными или четырёхпроводным, где четвертый провод — отвод от средней точки (если обмотки соединены по схеме звезды).
БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ. Как работает? Чем отличаться от щёточного? #бесколлекторный #МОТОР
Обмотки или, говоря простым словами, катушки медного провода укладываются в зубы сердечника статора. В зависимости от конструкции и назначения привода на статоре может быть разное количество зубцов. Встречаются разные варианты распределения обмоток фаз по зубцам ротора, что иллюстрирует следующий рисунок.

Обмотки каждого из зубов в пределах одной фазы могут соединяться последовательно или параллельно, в зависимости от поставленных конструктору задач по мощности и моменту проектируемого привода, а сами же обмотки фаз соединяются между собой по схеме звезды или треугольника, подобно асинхронным или синхронным трёхфазными электродвигателям переменного тока.
В статоре могут устанавливаться датчики положения ротора. Часто используются датчики холла, они дают сигнал контроллеру, когда на них воздействует магнитное поле магнитов ротора. Это нужно для того чтобы контроллер «знал», в каком положении находится ротор и подавал питание на соответствующие обмотки. Это нужно для повышения эффективности и стабильности работы, а если кратко, — чтобы выжать из двигателя всю возможную мощность. Датчиков обычно устанавливается 3 штуки. Но наличие датчиков усложняет устройство бесколлекторного электродвигателя, к ним нужно проводить дополнительные провода для питания и линии данных.

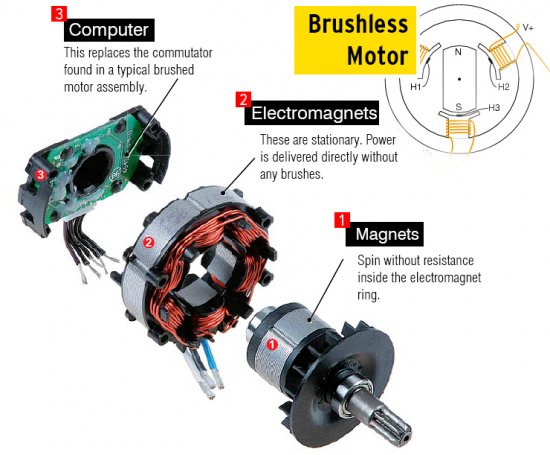
В БДПТ для возбуждения используются постоянные магниты, установленные на роторе, а статор — это якорь. Напомним, что в коллекторных машинах наоборот (ротор — это якорь), а для возбуждения в КД используются как постоянные магниты, так и электромагниты (обмотки).
Магниты устанавливаются с чередованием полюсов, и соответственно их количество определяет количество пар полюсов. Но это не значит, что сколько магнитов, то столько же и пар полюсов. Несколько магнитов могут формировать один полюс. От числа полюсов, как в случае и с асинхронным двигателем (и другими) зависит число оборотов в минуту. То есть от одного контроллера на одинаковых настройках бесколлекторные двигатели с разным числом пар полюсов будут вращаться с разной скоростью.
Что такое BLDC-мотор
BLDC двигатель, он же вентильный двигатель — это бесколлекторный синхронный двигатель постоянного тока на постоянных магнитах. Функцию коллектора в данном случае выполняет электронный контроллер, как если бы двигатель был коллекторный — контроллер переключает обмотки в зависимости от положения ротора с магнитами, определяемого датчиками Холла, установленными в мотор. Если двигатель застопорить, то контроллер будет подавать ток в те две фазы, которые должны его стронуть в нужную сторону. Контроллер не будет переключать фазы, пока ротор стоит. Дополнительно в отличие от механических коллекторов, это обеспечивает работу большого количества магнитных пар, чем может быть обеспечен значительно больший момент.
По сути, BLDC – это коллекторный двигатель с «электронным коллектором», но лишенный его недостатков в виде механического износа щеток и постоянного обслуживания щеточного узла для удаления нагара и загрязнений.
«Вентильный электродвигатель» — это наше, советское название. В зарубежной литературе они называются по другому. Общие аббревиатуры для обозначения синхронных бесколлектроных электродвигателей постоянного тока — это BLDC или PMSM:
BLDC — Brushless DC electric motor (бесколлекторный электродвигатель постоянного тока).
PMSM — Permanent Magnet Synchronous Motor (синхронный двигатель с постоянными магнитами).
Конструкция:
В роторе двигателя размещаются постоянные магниты, создающие магнитное поле, которые чередуются + — + -. В зависимости от количества магнитов, двигатель имеет соответствующее количество полюсов. Роторы линейки Golden Motor 3-5-10-20кВт имеют 8 магнитов, т.е. 4 пары магнитов.
Статор сделан из электротехнической стали и медной обмотки, уложенной в пазы сердечника. Количество обмоток определяет количество фаз двигателя. Для вращения необходимы 3 фазы. Обычно ВД трёхфазные, в Golden Motor в т.ч.
BLDC двигатель так же имеет более высокие эксплуатационные характеристики по сравнению с асинхронными двигателями. Он обладает лучшей удельной мощностью (мощность на килограмм массы), лучшим КПД, особенно на низких оборотах и на старте, более простое управление (асинхронным двигателям требуется чистый синус).
Каждому мотору нужен свой управляющий контроллер. Ниже представлено видео, объясняющее принцип действия:
Ротор
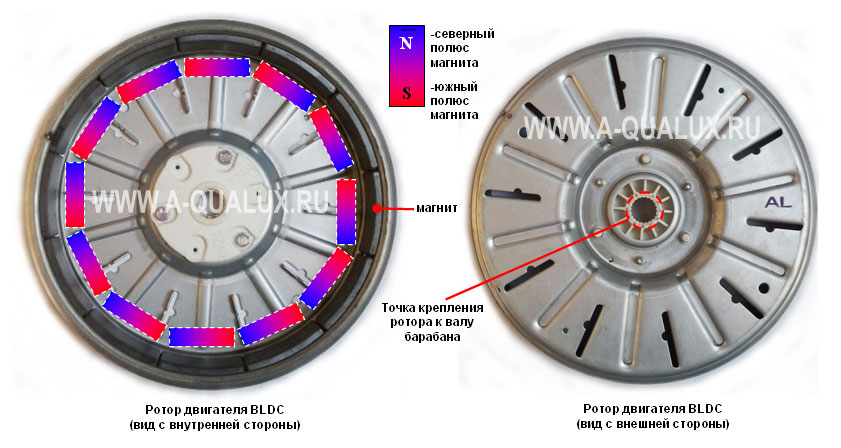
Рис.2 Ротор двигателя стиральной машины LG с прямым приводом
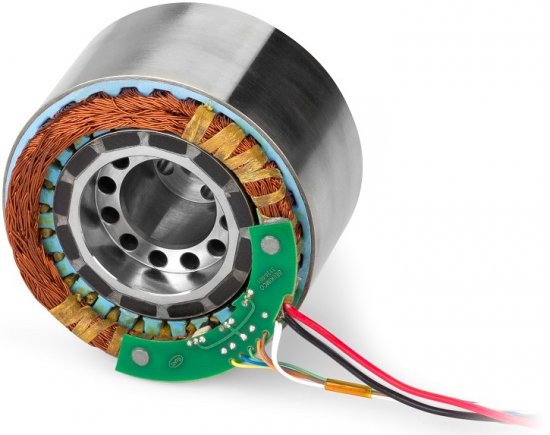
Ротор BLDC — вращающаяся часть двигателя (Рис.2) По форме напоминает чашу, к внутренней стороне которой специальным клеем крепятся магниты прямоугольной формы. Магниты всегда имеют чётное количество и установлены с чередованием полюсов. В нашем случае установлено 12 магнитов, размер которых зависит от геометрии двигателя и характеристик мотора. Чем сильнее применяемые магниты, тем выше момент силы, развиваемый двигателем на валу. В центре ротора есть специальное посадочное отверстие с насечками, что позволяет, при помощи болта или гайки, закрепить ротор напрямую к валу барабана. С внешней стороны ротора, продавлено 10 щелей образующих на обратной его стороне небольшие лопасти для охлаждения обмоток статора.
Статор
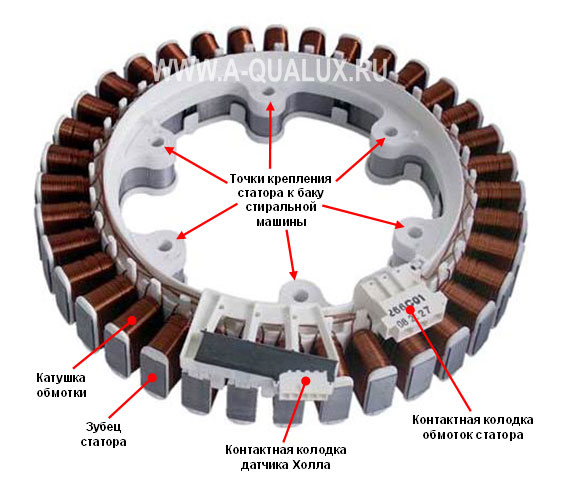
Рис.3 Статор двигателя стиральной машины LG с прямым приводом
Статор BLDC — неподвижная часть двигателя и крепится к задней части бака стиральной машины (Рис.3) Статор состоит из нескольких листов магнитопроводящей стали заключённый в пластиковый каркас, который служит изолятором. В целом, каркас статора напоминает круг с прямоугольными зубьями. На каждый зуб статора наматывается катушка.
Обмотка трёхфазного бесколлекторного двигателя изготовлена из медной проволоки толщиной 1 мм. Классическая обмотка выполняется одним проводом для одной фазы, то есть все обмотки на зубьях одной фазы соединены последовательно. В данном случае статор имеет 36 зубьев — это значит по 12 зубьев на одну фазу. Сопротивление обмотки каждой фазы порядка 10 Ом.
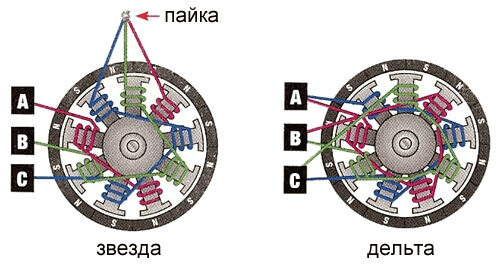
Как известно, в трёхфазных двигателях, обмотки соединяют по схеме звезда или треугольник.
В нашем случае, обмотки статора соединены по схеме звезда, т.е. концы фаз имеют общую точку (Рис.4)
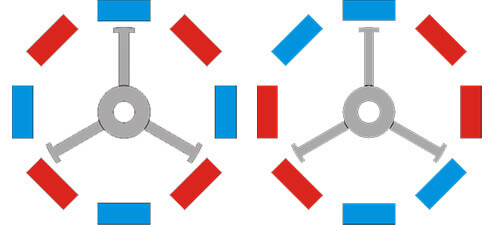
Поскольку в каждый момент времени работают только две фазы (при включении звездой), магнитные силы воздействуют на ротор неравномерно по всей окружности (Рис.5).
Силы, воздействующие на ротор, стараются его перекосить, что приводит к увеличению вибраций. Для устранения этого эффекта статор делают с большим количеством зубьев, а обмотку распределяют по зубьям всей окружности статора как можно равномернее (Рис.6)
Рис.6 Распределение магнитных сил в обмотке с несколькими зубьями
В двигателе стиральной машины LG, распределение фазных обмоток, а также относительное положение ротора и статора можно увидеть ниже (см. Рис.7). На схеме производителя, фазные обмотки обозначают буквами : V, W, U

Рис.7 Трёхфазный двигатель постоянного тока (BLDC) стиральной машины LG (общий вид)
Для контроля положения ротора применяется датчик работающий на эффекте Холла. Датчик реагирует на магнитное поле и поэтому его располагают на статоре таким образом, чтобы магниты ротора воздействовали на него.
Современные бесколлекторные двигатели постоянного тока
Современные бесколлекторные двигатели постоянного тока — это электродвигатели, которые не имеют щеток и коллектора для коммутации тока в обмотках. Вместо этого они используют специальную электронику для управления током в зависимости от положения ротора, на котором закреплены постоянные магниты.
Бесколлекторные двигатели имеют ряд преимуществ перед коллекторными, таких как высокий КПД, низкий уровень шума, длительный срок службы, возможность работы при высоких скоростях и моментах.
Бесколлекторные двигатели применяются в различных областях, таких как авиация, автомобильная промышленность, робототехника, медицина, бытовая техника и другие.

Благодаря существенному прогрессу в области полупроводниковой электроники и в технологии создания мощных неодимовых магнитов, широкое распространение получили сегодня бесколлекторные двигатели постоянного тока. Они применяются в стиральных машинах, пылесосах, вентиляторах, дронах и т. д.
И хотя идея касательно принципа работы бесколлекторного двигателя высказывалась еще в начале 19 века, она ждала своего часа до начала полупроводниковой эры, когда технологии стали готовы к практической реализации этой интересной и эффективной концепции, позволившей бесколлекторным двигателям постоянного тока шагать так широко, как это происходит сегодня.
В англоязычной версии двигатели данного типа именуются BLDC motor – Brushless Direct Current Motor — бесщеточный двигатель постоянного тока. Ротор двигателя содержит постоянные магниты, а рабочие обмотки располагаются на статоре, то есть устройство BLDC двигателя полностью противоположно тому, как это имеет место в классическом коллекторном двигателе. Управляется BLDC двигатель электронным регулятором, который называют ESC — Electronic speed controller — электронный регулятор хода.
Электронный регулятор хода и высокий КПД
Электронный регулятор хода позволяет плавно варьировать электрическую мощность, подаваемую на бесколлекторный электродвигатель. В отличие от ранних, более простых версий резистивных регуляторов хода, которые просто ограничивали мощность путем включения в цепь последовательно с двигателем активной нагрузки, превращающей избыточную мощность в тепло, электронный регулятор хода позволяет получить значительно более высокий КПД, не расходуя подводимую электрическую энергию на бесполезный нагрев.
Бесколлекторный двигатель постоянного тока можно классифицировать как самосинхронизируемый синхронный двигатель, в котором полностью исключен искрящий узел, требующий регулярного обслуживания — коллектор. Функцию коллектора несет на себе электроника, благодаря чему вся конструкция изделия сильно упрощается и становится компактнее.
Щетки заменены, по сути, на электронные ключи, потери в которых сильно меньше чем были бы при механической коммутации. Мощные неодимовые магниты на роторе позволяют добиться большего момента на валу. И греется такой двигатель меньше нежели его коллекторный предшественник.
В итоге КПД двигателя получается наилучшим, а показатели мощности на килограмм веса — выше, плюс достаточно широкий диапазон регулировки скорости вращения ротора и практически полное отсутствие генерируемых радиопомех. Конструктивно двигатели данного типа легко адаптируются для эксплуатации в воде и в агрессивных средах.
Электронный блок управления — очень важная и дорогостоящая часть бесколлекторного двигателя постоянного тока, без которой, однако, никак не обойтись. От данного блока двигатель получает питание, параметры которого одновременно влияют и на скорость, и на мощность, которую двигатель будет в состоянии развить под нагрузкой.
Даже если скорость вращения регулировать не нужно, все равно электронный блок управления необходим, ведь он несет на себе не только функцию управления, но также имеет силовую составляющую. Можно сказать, что ESC – это аналог частотного регулятора для асинхронных двигателей переменного тока, специально предназначенный для питания и управления бесколлекторным двигателем постоянного тока.
Управление двигателем BLDC
Чтобы понять как происходит управление BLDC двигателем, сначала вспомним как работает коллекторный двигатель. В его основе принцип вращения рамки с током в магнитном поле.
Каждый раз, когда рамка с током повернулась и нашла положение равновесия, коммутатор (щетки прижатые к коллектору) изменяет направление тока через рамку, и рамка движется дальше. Этот процесс повторяется при движении рамки от полюса к полюсу. Только вот в коллекторном двигателе таких рамок много и магнитных полюсов несколько пар, поэтому коллекторно-щеточный узел содержит не два контакта, а много.
Электронный блок управления бесколлекторным двигателем делает то же самое. Он изменяет полярность магнитного поля как только ротор необходимо провернуть дальше из положения равновесия. Только управляющее напряжение подается не на ротор, а на обмотки статора, и делается это при помощи полупроводниковых ключей в нужные моменты времени (фазы ротора).
Очевидно, что электрический ток на обмотки статора бесколлекторного двигателя необходимо подавать в правильные моменты времени, то есть тогда, когда ротор находится в определенном известном положении. Для этого применяется один из следующих методов. Первый — на основе датчика положения ротора, второй — путем измерения ЭДС на одной из обмоток, которая в данный момент не получает питание.
Датчики бывают разными, магнитными и оптическими, наиболее популярны магнитные датчики на основе эффекта Холла. Второй способ (на основе измерения ЭДС) хотя и эффективен, однако он не позволяет осуществлять точное управление на низких скоростях и при старте. А вот датчики Холла обеспечивают возможность более точного управления во всех режимах. В трехфазных BLDC двигателях таких датчиков три штуки.
Двигатели без датчиков положения ротора применимы в тех случаях, когда старт двигателя происходит без нагрузки на валу (вентилятор, пропеллер и т. п.). Если же старт происходит под нагрузкой, необходим двигатель с датчиками положения ротора. В том и в другом варианте есть свои плюсы и минусы.
Решение с датчиком оборачивается более удобным управлением, но при выходе из строя хотя бы одного из датчиков, двигатель придется разбирать, к тому же датчики требуют отдельных проводов. В варианте без датчика нет надобности в специальных проводах, но во время старта ротор будет раскачиваться туда-сюда. Если это недопустимо, необходимо ставить в систему датчики.
Ротор и статор, количество фаз
Ротор BLDC двигателя может быть наружным или внутренним, а статор, соответственно, внутренним или наружным. Статор изготавливают из магнитопроводящего материала, с количеством зубцов, которое нацело делится на количество фаз. Ротор может быть изготовлен необязательно из магнитопроводящего материала, но обязательно с жестко зафиксированными на нем магнитами.

Чем сильнее магниты — тем выше доступный вращающий момент. Количество зубцов статора не обязательно должно быть равно количеству магнитов на роторе. Минимальное количество зубцов равно количеству фаз управления.
Большинство современных бесколлекторных двигателей постоянного тока — трехфазные, просто в силу простоты такой конструкции и способа управления ею. Как и в асинхронных двигателях переменного тока, обмотки трех фаз соединяются здесь на статор «треугольником» либо «звездой».
Такие двигатели без датчиков положения ротора имеют 3 питающих провода, а двигатели с датчиками — 8 проводов: дополнительные два провода — для питания датчиков и три — сигнальные выводы датчиков.
Обмотка статора выполняется изолированным медным проводом так, чтобы сформировать магнитные полюса необходимого количества фаз, равномерно распределенные по окружности ротора. Количество отдельно стоящих полюсов на статоре для каждой фазы выбирается исходя из требуемой скорости вращения двигателя (и вращающего момента).
Низкооборотные двигатели с наружным ротором делают с большим количеством полюсов (и соответственно зубцов) на каждую фазу, чтобы получить вращение с угловой частотой значительно меньше частоты управляющего тока. Но даже в высокооборотных трехфазных двигателях обычно не применяют количество зубцов меньше 9.
Телеграмм канал для тех, кто каждый день хочет узнавать новое и интересное: Школа для электрика
Управление бесколлекторным двигателем
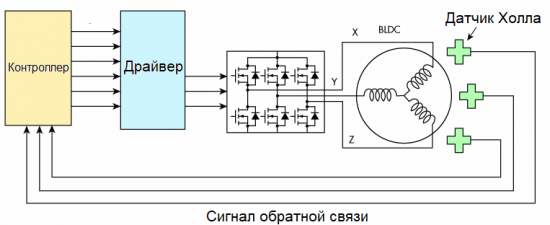
Как уже указывалось выше, управление коммутацией обмоток привода осуществляется электроникой. Чтобы определить, когда производить переключения, драйвер отслеживает положение якоря при помощи датчиков Холла. Если привод не снабжен такими детекторами, то в расчет берется обратная ЭДС, которая возникает в неподключенных катушках статора. Контроллер, который, по сути, является аппаратно-программным комплексом, отслеживает эти изменения и задает порядок коммутации.
Большинство БД выполняются в трехфазном исполнении. Для управления таким приводом в контролере имеется преобразователь постоянного напряжения в трехфазное импульсное (см. рис.7).

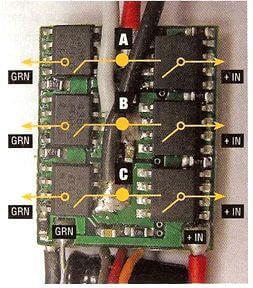
Чтобы объяснить, как работает такой вентильный двигатель, следует вместе с рисунком 7 рассматривать рисунок 4, где поочередно изображены все этапы работы привода. Распишем их:
- На катушки «А» подается положительный импульс, в то время как на «В» — отрицательный, в результате якорь сдвинется. Датчиками зафиксируется его движение и подастся сигнал для следующей коммутации.
- Катушки «А» отключается, и положительный импульс идет на «С» («В» остается без изменения), далее подается сигнал на следующий набор импульсов.
- На «С» — положительный, «А» — отрицательный.
- Работает пара «В» и «А», на которые поступают положительный и отрицательный импульсы.
- Положительный импульс повторно подается на «В», и отрицательный на «С».
- Включаются катушки «А» (подается +) и повторяется отрицательный импульс на «С». Далее цикл повторяется.
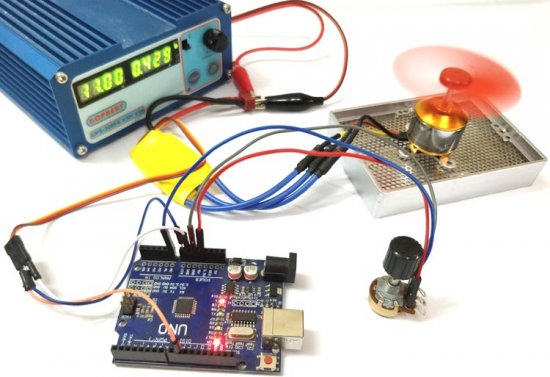
В кажущейся простоте управления есть масса сложностей. Нужно не только отслеживать положение якоря, чтобы произвести следующую серию импульсов, а и управлять частотой вращения, регулируя ток в катушках. Помимо этого следует выбрать наиболее оптимальные параметры для разгона и торможения. Стоит также не забывать, что контроллер должен быть оснащен блоком, позволяющим управлять его работой. Внешний вид такого многофункционального устройства можно увидеть на рисунке 8.

Преимущества и недостатки
Электрический бесколлекторный двигатель имеет много достоинств, а именно:
- Срок службы значительно дольше, чем у обычных коллекторных аналогов.
- Высокий КПД.
- Быстрый набор максимальной скорости вращения.
- Он более мощный, чем КД.
- Отсутствие искр при работе позволяет использовать привод в пожароопасных условиях.
- Не требуется дополнительное охлаждение.
- Простая эксплуатация.
Теперь рассмотрим минусы. Существенный недостаток, который ограничивает использование БД – их относительно высокая стоимость (с учетом цены драйвера). К числу неудобств следует отнести невозможность использования БД без драйвера, даже для краткосрочного включения, например, чтобы проверить работоспособность. Проблемный ремонт, особенно если требуется перемотка.
Технология бесщеточного электродвигателя BL-Motor


Технология BL–Motor в бесщеточных двигателях обеспечивает высокую производительность, увеличенную мощность и длительный срок службы. Бесщеточный двигатель с электронным управлением эффективно использует энергию аккумулятора, имеет более высокие технические характеристики и применим в разных областях.
В 2 раза больше времени работы
Эффективнее других на 50 %. Полностью заряженный аккумулятор 18 В прослужит почти вдвое дольше.
Меньше трения, больше крутящего момента
Без угольных щёток двигатель может создавать больший крутящий момент на единицу веса.
Меньше шума и нагрева
Снижается шум и нагрев мотора и корпуса, что важно на производствах, требующих непрерывной и длительной работы.
Длительная эксплуатация
Не требует сложного технического обслуживания ввиду отсутствия щеток.
Видеообзор
Обзор технологии бесщеточного двигателя BL-Motor
Более 10 лет MAKITA работает с бесщеточными двигателями. Такой тип двигателя используется в аэрокосмической и военной промышленности, а сейчас он применяется при производстве самой разнообразной техники, в частности, электроинструмента.

Строение и особенности двигателя BL-Motor
Перемещение обмотки бесщеточного двигателя осуществляется на статор, магнитов же — на ротор. Заменой коллекторно-щёточного узла, который отвечает за изменение параметров (коммутацию) обмоток, в таком моторе стала электроника. Датчики устанавливаются на ротор, отслеживая его положение. На основании полученных таким образом данных контроллером осуществляется подача напряжения на ту обмотку, которая нужна в конкретный момент времени. В результате этого поля изменяются, и происходит вращение.
Благодаря тому, что у бесщёточных двигателей нет щеточно-коллекторного узла, он не издаёт шума, не искрит, имеет достаточно высокий коэффициент полезного действия, а также не требует периодической замены и регулярного обслуживания. Помимо этого, он имеет немало других очевидных преимуществ.
Бесщёточные электродвигатели Комментировать
Бесщёточные, или бесколлекторные, двигатели представляют собой электродвигатели, в конструкции которых отсутствуют щётки и коллектор. Перемагничивание обмоток статора такого двигателя обеспечивает непрерывное вращение ротора. Трение, происходящее внутри механизма, в бесщёточном двигателе сведено к минимуму, а отсутствие коллектора устраняет проблему его перегрева, благодаря чему срок службы бесщёточных механизмов ограничивается, фактически, только ресурсом подшипников ротора. Наиболее популярными типами бесщёточных двигателей являются асинхронные двигатели переменного тока, шаговые двигатели и вентильные реактивные двигатели. Важнейшими преимуществами бесщёточных электродвигателей являются:
– чрезвычайно высокий, не менее 90%, КПД;
– длительный срок службы;
– высокая нагрузочная способность;
– устойчивость к перегрузкам;
– пониженный уровень нагрева;
– компактные размеры;
– возможность регулировки частоты оборотов в широком диапазоне;
– малые электропотери;
– практически бесшумная работа.
Применение бесщёточных двигателей
Сочетающие в себе лучшие качества электродвигателей переменного и постоянного тока, такие, как повышенная степень надёжности и простота управления, бесщёточные электродвигатели обрели широкую популярность практически во всех сферах деятельности современного человека. Отсутствие присущих щёточным механизмам недостатков, таких, как плохой теплоотвод, быстрый износ трущихся деталей, слабая помехоустойчивость и искрение, обеспечило бесщёточным двигателям возможность применения в самых различных направлениях, от сложного производственного оборудования до любительского моделизма. Благодаря простому управлению, бесщёточные двигатели стали незаменимыми элементами оборудования, при работе которого важен точный контроль скорости: компьютеры, принтеры и т.п. Благодаря отсутствию искр при работе такого электродвигателя, его использование возможно, в том числе, в условиях агрессивной и взрывоопасной среды, при проведении работ с летучими химическими веществами и топливом.
Надёжность, простота использования, высокие эксплуатационные показатели, отсутствие «проблемных» элементов – бесщёточные двигатели практически не имеют недостатков, за исключением одного: стоимость бесщёточного электродвигателя, значительно более высокая, чем аналогичной коллекторной модели. Поэтому к задаче покупки такого агрегата следует подойти со всей ответственностью, отдавая предпочтение надёжным производителям и проверенным поставщикам. Решив купить бесщёточный двигатель в наличии по доступной цене на нашем сайте, внимательно изучите характеристики интересующего вас устройства, габаритные и присоединительные размеры, а также ознакомьтесь с условиями его эксплуатации.



